AI360全景影像系統集成|AI360全景影像系統集成方案|AI360全景影像系統集成方案定制及應用
AI360全景影像系統網口輸出集成無線遙控技術:原理、定制方案與工程應用全解析
在工業4.0與"雙碳"戰略驅動下,自動駕駛電動挖掘機正成為工程建設、礦山開采等領域的智能化轉型核X裝備。AI360全景影像系統通過網口(ONVIF)標準化傳輸與無線遙控技術的深度融合,構建了"環境全感知-指令低延遲-作業高精度"的無人化作業體系。從核X原理、定制化方案到工程適配場景進行系統性闡述,為行業提供可落地的技術參考。
一、技術原理:網口傳輸與無線遙控的協同架構
1.1 三層閉環系統架構設計
AI360全景影像系統采用"感知-傳輸-控制"深度協同的分層架構,解決傳統工程機械視野盲區大、遠程操控延遲高、復雜環境適應性弱等痛點:
關鍵技術突破點:
全透明拼接算法:通過圖像畸變校正、特征點匹配和動態融合技術,實現360°無死角環視影像(水平視場角190°×4路,垂直視場角120°),拼接縫誤差≤1個像素
低延遲傳輸協議:采用H.265+智能預編碼技術,在2Mbps帶寬下實現1080P@30fps視頻傳輸,端到端延遲控制在150ms內(5G網絡環境)
多模態數據融合:通過卡爾曼濾波融合視覺與雷達數據,在雨霧、強光等惡劣天氣下仍保持98%以上的障礙物識別準確率
1.2 ONVIF網口傳輸的技術優勢作為系統的"神經網絡",符合ONVIF協議的千兆網口傳輸模塊相比傳統模擬信號/USB傳輸具有明顯優勢:
 工程化設計要點:
工程化設計要點:
采用工業級RJ45接口(M12圓形連接器),防護等級達IP67,適應-40℃~+85℃工作環境
支持IEEE 802.3af PoE標準,單口供電功率30W,減少挖掘機艙內布線復雜度
內置網絡診斷工具,可實時監測丟包率、帶寬占用率,支持遠程OTA升級
二、無線遙控系統的核X技術實現
2.1 雙向數據鏈路構建
系統采用"4G/5G公網+本地WiFi備份"的雙鏈路設計,確保在偏遠礦區、隧道等復雜場景下的通信可靠性:
上行鏈路(設備→控制端):
主通道:5G SA模式(理論速率2Gbps),傳輸全景視頻流(8Mbps)、設備狀態數據(115200bps)
備份通道:IEEE 802.11ac WiFi 6(5.8GHz頻段),傳輸關鍵控制指令
數據加密:采用ECC橢圓曲線加密算法,防止控制指令被篡改
下行鏈路(控制端→設備):
控制指令集:包含32路模擬量(操縱桿行程)+16路開關量(燈光/喇叭等)
傳輸協議:自定義CANoe擴展協議,指令刷新頻率100Hz
優先級調度:將鏟斗姿態控制指令設為比較高優先級(QoS DSCP標記EF)
2.2 遠程操控終端技術特性
根據作業場景需求,可配置兩類操控終端:

力反饋技術:通過采集液壓系統壓力傳感器數據,在操控桿端模擬不同土壤硬度的反饋力,實現"遠程如親臨"的操作手感(力反饋分辨率0.5N,響應時間<20ms)
三、定制化方案設計:從硬件到算法的深度適配
3.1 硬件模塊化定制選項
針對不同噸位挖掘機(1.5T~70T)的安裝空間和作業需求,系統提供靈活的模塊化配置:

特種車定制案例:
隧道挖掘機:采用超廣角(220°)防霧攝像頭+紅外補光,配合加熱除霧玻璃,解決隧道內光照不均問題
港口抓料機:定制耐腐蝕攝像頭外殼(316不銹鋼材質),適應鹽霧環境(5000小時鹽霧測試無腐蝕)
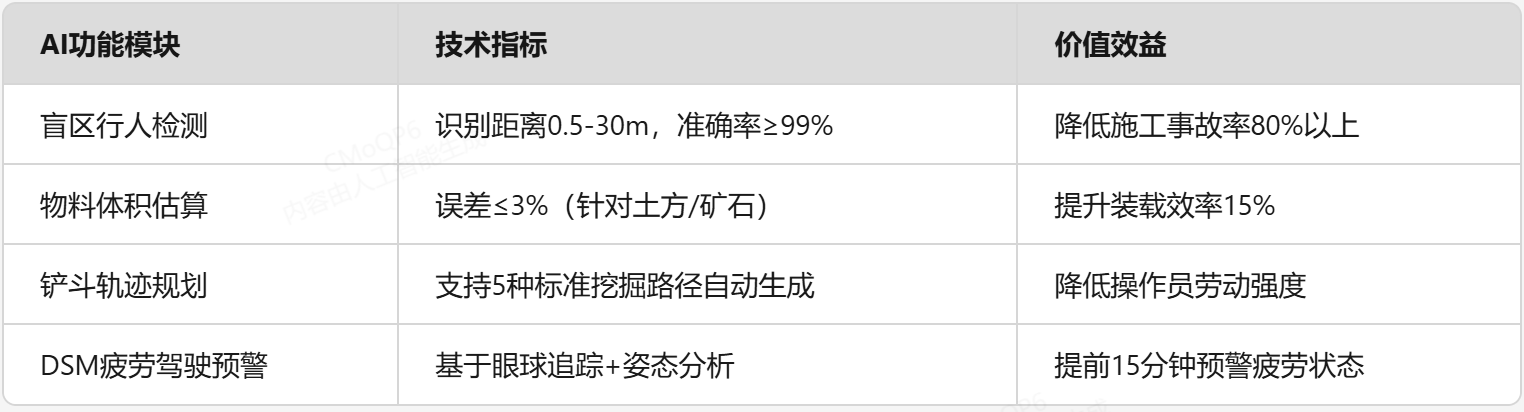
3.2 算法G能定制開發
基于客戶需求,可集成以下AI增強功能(采用NVIDIA Jetson TX2邊緣計算平臺):
 四、工程適配場景與技術優勢
四、工程適配場景與技術優勢
4.1 典型應用場景技術適配
AI360系統在不同場景展現出差異化技術優勢:
場景1:露天礦山高危作業
核X痛點:爆破后二次塌方風險、粉塵大視野差、設備噸位大(30T以上)操作精度要求高
技術適配:
采用8路500萬像素攝像頭+16線激光雷達,實現200米范圍三維環境建模
5G+MEC邊緣節點部署,將控制延遲壓縮至80ms內
搭載礦用隔爆型外殼(Ex d IIC T6 Gb),通過煤安認證
應用效果:某鐵礦項目實現3臺挖機遠程操控,作業人員撤離至3公里外安全區,年減少安全事故損失超200萬元
場景2:市政工程狹小空間作業
核X痛點:城市管網改造中地下空間狹窄(2m×2m)、周邊管線密集易損壞
技術適配:
定制180°超廣角微型攝X頭(直徑45mm),安裝于鏟斗臂根部
開發"透S模式"算法,通過多視角融合消除鏟斗對視野的遮擋
配置平板便攜式操控終端,支持單人背負式移動作業
應用效果:深圳某管網改造項目將地下管道開挖精度提升至±5cm,避免3起管線破損事故
場景3:水利工程夜間施工
核X痛點:汛期搶工期需24小時作業、水面反光影響視覺判斷
技術適配:
采用星光級低照度攝像頭(0.001lux)+激光補光燈(射程100m)
開發水面波紋抑制算法,提升夜間圖像清晰度300%
配置雙電池冗余供電系統,確保連續工作12小時
應用效果:長江某堤防加固工程將夜間作業效率提升至白天的85%,提前15天完成防汛節點
4.2 綜合技術優勢對比
與傳統作業模式相比,AI360網口+無線遙控系統展現出明顯的經濟與社會效益:

五、實施建議與未來趨勢
5.1 工程實施關鍵注意事項
網絡環境評估:
遠程作業前需進行場強測試,確保5G信號覆蓋≥-90dBm,弱場區域需部署微基站
核X控制指令采用UDP+前向糾錯編碼(FEC),確保丟包率≤1%時仍可正常解碼
設備安裝規范:
攝像頭安裝需進行激光標定,確保拼接誤差≤0.5°
網口接頭需做防水處理(采用熱縮管+防水膠雙重防護),電纜固定間隔≤50cm
人員培訓體系:
操作員需通過"虛擬仿真+真機實操"雙認證,考核重點包括緊急故障處理(如通信中斷應急操作)
5.2 技術發展趨勢
隨著5G-A、AI大模型等技術成熟,系統將向以下方向演進:
傳輸技術:6G預研技術(如太赫茲通信)將實現10Gbps級傳輸,支持8K全景視頻+全息影像遠程操控
AI決策:基于礦山數字孿生的自主作業系統,可實現多機協同無人化集群作業
能源優化:結合光伏充電與AI能耗預測,電動挖掘機續航時間將突破8小時(當前行業平均5小時)
結語
AI360全景影像系統通過網口標準化傳輸與無線遙控技術的深度融合,不僅解決了工程機械"看得清、控得準、用得安"的核X訴求,更推動行業向"少人化-無人化-智能化"轉型。隨著廣州精拓電子等企業在硬件模塊化、算法開源化、協議標準化方面的持續投入,該技術正從高端定制走向規模化應用。對于工程企業而言,選擇具備ONVIF協議兼容性、支持多傳感器擴展、通過工業級認證的成熟方案,將是降低實施風險、快速實現價值回報的關鍵。
- 商用車疲勞駕駛預警系統方案商 2025-12-09
- 河北卡車多路視頻拼接系統生產廠家 2025-12-09
- 中國臺灣起重機多路視頻拼接系統廠家供應 2025-12-09
- 內蒙古車輛多路視頻拼接系統定制開發 2025-12-08
- 河南司機行為檢測預警系統 2025-12-08
- 船舶多路視頻拼接系統應用效果 2025-12-08
- 北京疲勞駕駛預警系統定制開發 2025-12-08
- 重慶司機行為檢測預警系統進度計劃 2025-12-08
- 江西AI疲勞駕駛預警系統 2025-12-08
- 福建叉車多路視頻拼接系統開發商 2025-12-08
- 廣東LC100無線電調減震多久充一次氮氣 2025-12-09
- 嘉定區通常智能座艙模型服務熱線 2025-12-09
- 徐匯區質量五金交電直銷價 2025-12-09
- 進口阻燃材料檢測常見問題 2025-12-09
- 商用車疲勞駕駛預警系統方案商 2025-12-09
- 徐州本地汽車連接器銷售廠家 2025-12-09
- 揭陽鋁型材銅散熱器批發 2025-12-09
- 深圳合誠氟素脂環保無毒 2025-12-09
- 浙江tesa4657百格測試布基膠帶銷售電話 2025-12-09
- 奉賢區進口阻燃材料檢測 2025-12-09