AI360全景影像系統網口輸出集成|AI360全景影像系統定制|AI360全景影像系統集成應用優勢
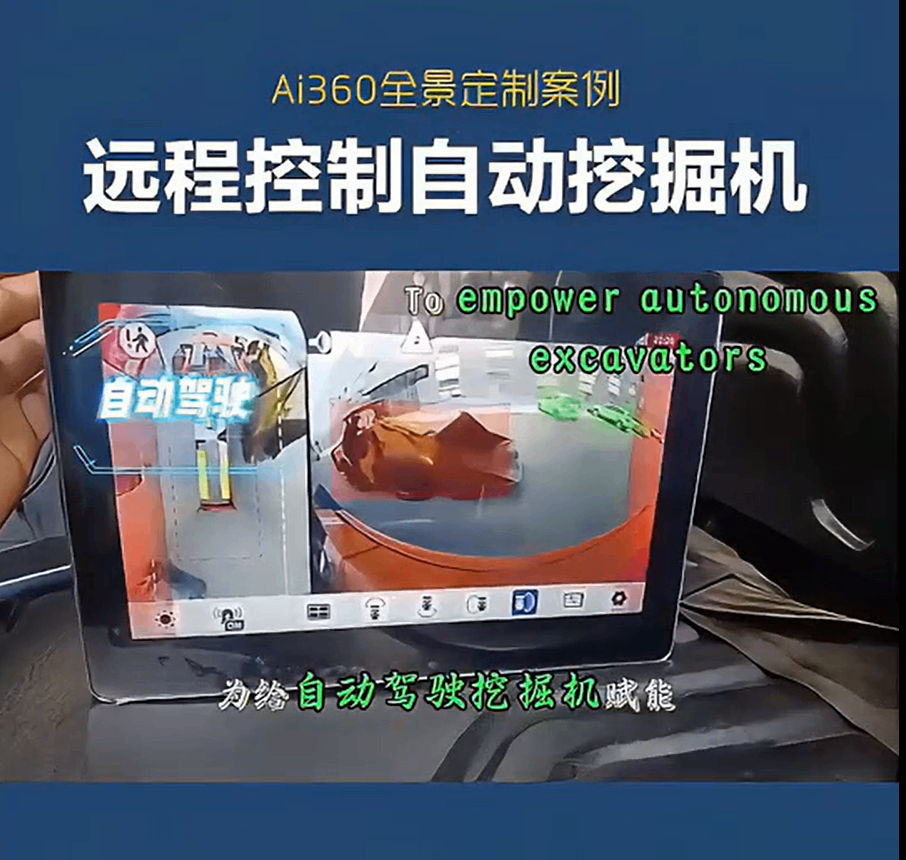
AI360全景影像系統網口輸出集成無線遙控操作在自動駕駛電動挖掘機上的應用與技術優勢
隨著工業智能化和無人化作業趨勢的加速發展,自動駕駛電動挖掘機正逐步成為現代工程建設、礦山開采及高危環境作業中的關鍵技術裝備。其中,AI360全景影像系統通過網口(ONVIF)視頻傳輸并集成無線遙控操作的技術方案,已成為提升設備安全性、遠程操控性與系統可擴展性的核X支撐。本文將從系統架構、核X技術原理、應用場景適配以及綜合技術優勢四個方面,全M闡述該系統的安裝應用及其帶來的深遠價值。
一、系統總體架構與功能集成
AI360全景影像系統是基于多傳感器融合與網絡化通信設計的一體化智能視覺解決方案,在自動駕駛電動挖掘機中主要由以下模塊構成:
1,多路高清魚眼攝像頭:通常配置4~8個廣角攝像頭,分布于車體四周,實現無死角環境采集。
2,圖像拼接處理單元:采用邊緣計算平臺對原始圖像進行畸變校正、色彩匹配與無縫拼接,生成實時360°俯視全景視圖。
3,ONVIF標準網口視頻輸出模塊:通過RJ45以太網接口輸出標準化視頻流(支持RTSP協議),確保兼容主流監控平臺。
4,4G/5G無線通信模塊:實現遠程數據鏈路上下行,支持視頻回傳與控制指令下發。
5,CAN總線控制系統接口:用于接收遠程操作指令,并驅動執行機構完成挖掘動作。
6,云端管理平臺:實現多機調度、狀態監控、錄像存儲與AI分析等功能。
關鍵特征:系統采用“本地感知 + 網絡傳輸 + 遠程控制”的三層架構,形成閉環式智能作業體系。
二、核X技術解析:網口(ONVIF)傳輸的核X價值
1. 高速穩定的視頻流保障
自動駕駛場景下,環境感知必須具備高分辨率、低延遲、連續流暢的特點。AI360系統依賴網口(Ethernet)作為主干傳輸通道,具有明顯性能優勢:
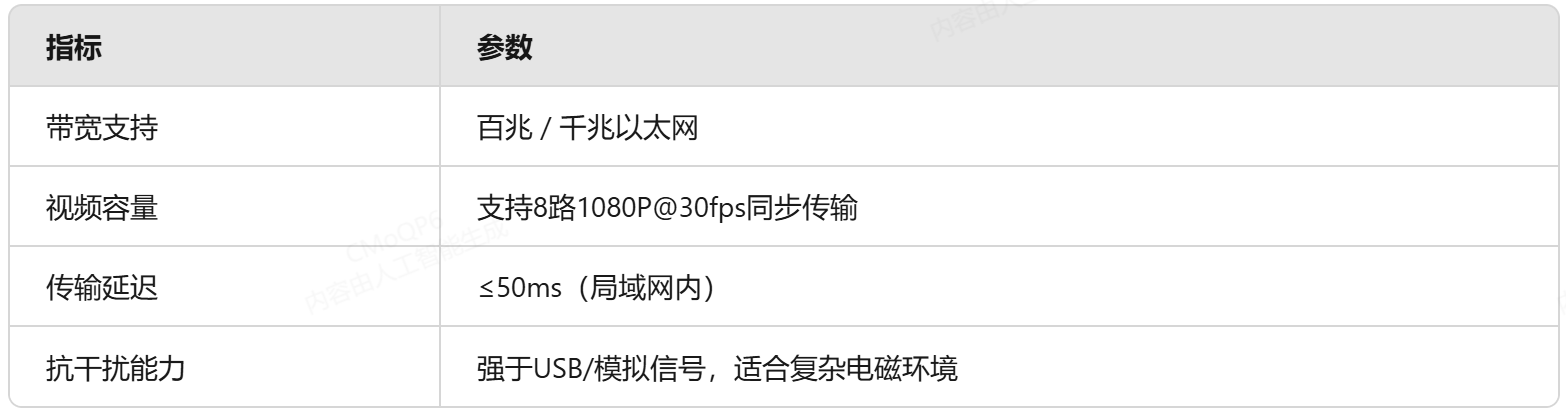
實際應用中,8路高清視頻經H.264/H.265編碼后通過千兆網口匯聚至中Y處理器,拼接成全景畫面,為遠程操作提供精細的空間感知依據。
2. ONVIF協議支持:標準化帶來的開放性與兼容性
ONVIF(Open Network Video Interface Forum)是一種全球通用的安防設備互聯標準,其在本系統中的作用體現在:
1)跨品牌設備互通:攝像頭、NVR、云平臺無需專有SDK即可接入系統;
2)無縫對接工地智慧管理系統:可與VMS(視頻管理平臺)、MES、SCADA等系統聯動;
3)便于AI算法集成:如盲區監測(BSD)、行人識別、障礙物預警等功能可通過標準API調用;
4)支持RTSP流媒體協議:實現遠程實時預覽、錄像回放與AI行為分析。
示例:某大型礦區部署多臺搭載AI360系統的電動挖機,所有視頻流統一接入ONVIF兼容的中Y指揮平臺,實現集中監管與智能告警。
3. 工業級可靠性設計針對工程機械嚴苛工況,系統在網絡傳輸層進行了多重加固設計:
1)工作溫度范圍:-30℃ ~ +85℃,適應極寒或高溫作業環境;
2)防護等級:IP67/IP69K,防塵防水,抗高壓沖洗;
3)PoE供電支持(Power over Ethernet):一根網線同時傳輸數據與電力;
4)減少車內布線復雜度,降低故障率;提升整體系統集成度與維護便利性。
三、無線遙控操作的技術實現路徑
1. 基于4G/5G的遠程數據鏈路構建
AI360系統通過內置4G通信模塊(高D機型支持5G),建立雙向無線通信鏈路:
上行鏈路:將AI360生成的全景視頻、GPS坐標、設備狀態等信息上傳至云端或本地服務器;
下行鏈路:操作員通過平板、PC工作站發送轉向、挖掘、行走等控制命令,經加密后下發至車載控制器。
要求端到端延遲控制在 <200ms,以保證操作響應及時性和作業安全。
2. 雙向低延遲協同機制
為應對無線網絡波動帶來的延遲風險,系統引入以下優化策略:
1)視頻壓縮優化:使用H.265高效編碼,降低帶寬占用;
2)邊緣預處理機制:
在設備端運行輕量級AI模型(如YOLOv5s);
自動檢測行人、車輛等目標,觸發本地聲光報警或緊急制動;
避免完全依賴云端決策導致的響應滯后;
QoS優先級調度:控制指令優先于視頻流傳輸,確保關鍵動作不被阻塞。
3. 云端協同與多機管理能力
借助網口+4G組合架構,系統可接入智慧云平臺,實現更高級別的管理功能:
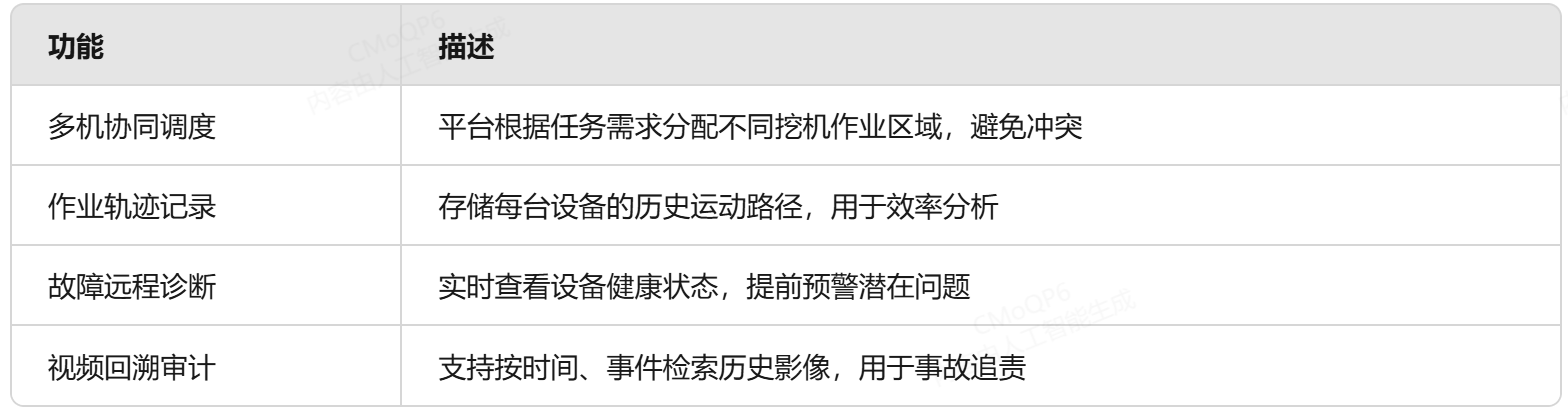
應用案例:某市政工程公司利用該平臺遠程管理10臺電動挖機,在夜間非高峰時段自動執行溝渠開挖任務,實現“無人值守+遠程監督”。
四、典型應用場景與行業適配優勢
1. 高危環境下的無人化作業
1)礦山爆破后清理:人員遠離塌方、有毒氣體區域,遠程操控完成殘渣清C;
2)地下隧道施工:空間狹窄、通風不良,通過全景影像輔助精細定位;
3)城市老舊城區改造:在密集建筑間靈活作業,避免碰撞管線與行人。
操作員可在百米外安全區域通過平板實時觀察360°畫面,結合GIS地圖進行精確導航與作業規劃。
2. 復雜工況下的無死角感知增強
傳統挖掘機存在嚴重視覺盲區,尤其在倒車、旋轉作業時極易發生事故。AI360系統有效解決這一痛點:
1)全景拼接成像:生成鳥瞰視角,直觀顯示車身周圍動態;
2)BSD盲區監測:
AI自動識別進入危險區域的人員或設備;
觸發蜂鳴器、閃光燈提醒;
可設定自動減速或停機閾值;
動態引導線疊加:隨方向盤角度變化調整預測軌跡,提升操作精度。
3. 模塊化擴展與多傳感器融合
系統預留豐富接口,支持未來升級與定制化集成:
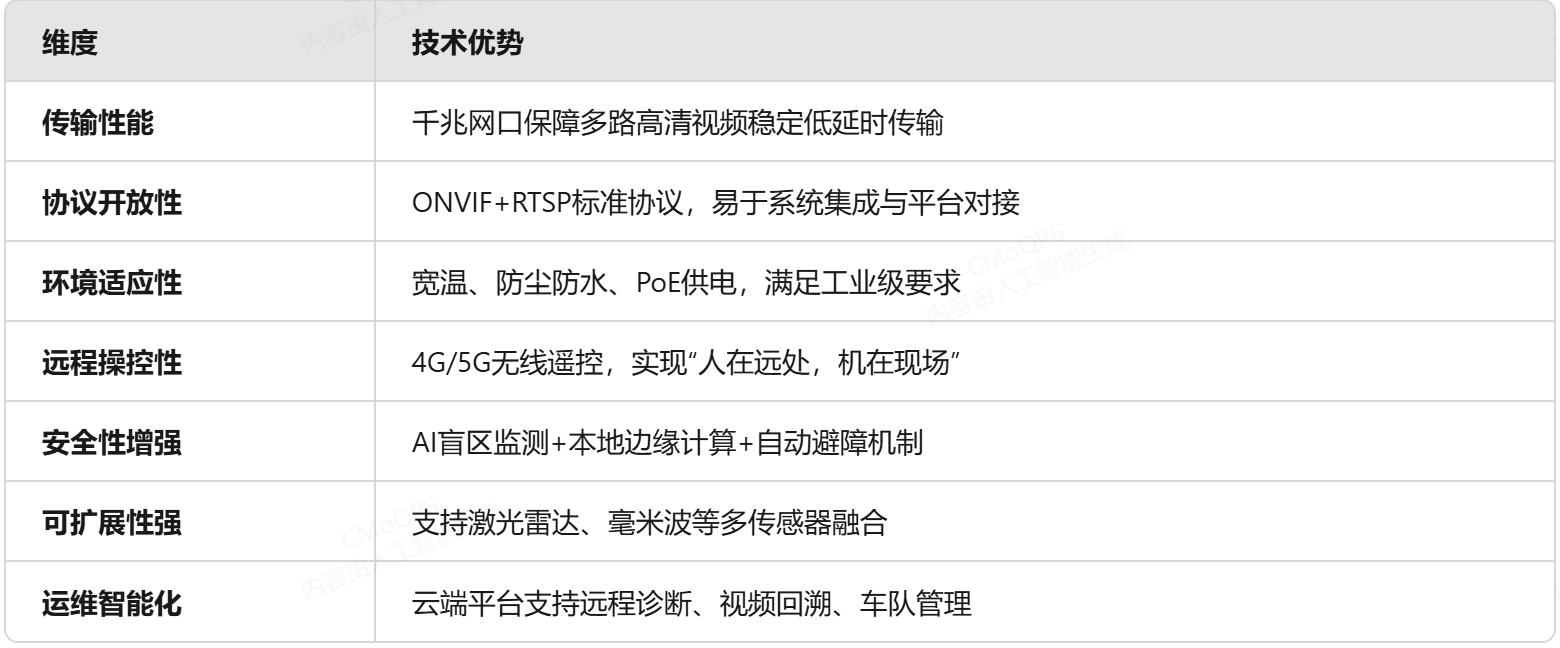
 五、綜合技術優勢總結
五、綜合技術優勢總結
 六、結語:邁向“硬件模塊化 + 協議標準化 + 云端協同化”的工業物聯網新時代
六、結語:邁向“硬件模塊化 + 協議標準化 + 云端協同化”的工業物聯網新時代
AI360全景影像系統通過網口輸出(ONVIF)與無線遙控深度集成,不僅解決了傳統工程機械“看得見、控得了、管得清”的三大難題,更為自動駕駛電動挖掘機的規模化、智能化落地提供了堅實基礎。其背后體現的是工業物聯網(IIoT)架構理念的成熟實踐——即:
“前端感知智能化、中間傳輸標準化、后端控制云端化”
未來,隨著5G專網、MEC邊緣計算、AIGC輔助決策等新技術的深度融合,此類系統將在智慧礦山、數字工地、應急救援等領域發揮更大價值,推動工程機械全M邁入“無人化、可視化、數字化”新紀元。
- 河南360全景多路視頻拼接系統方案商 2025-12-09
- 商用車疲勞駕駛預警系統方案商 2025-12-09
- 廣東360盲區偵測系統廠家供應 2025-12-09
- 四川起重機多路視頻拼接系統生產廠家 2025-12-09
- 河北卡車多路視頻拼接系統生產廠家 2025-12-09
- 司機行為監測司機行為檢測預警系統聯系方式 2025-12-09
- 中國臺灣起重機多路視頻拼接系統廠家供應 2025-12-09
- 工程車360全景影像銷售 2025-12-09
- 中國澳門司機行為檢測預警系統開發商 2025-12-09
- 內蒙古車輛多路視頻拼接系統定制開發 2025-12-08
- 松江區無憂汽摩配件廠家電話 2025-12-09
- 環衛車360度全景影像廠家 2025-12-09
- 深圳AGSHOCKS山地車后膽壓縮行程 2025-12-09
- 湖南合金折疊翅片維修 2025-12-09
- 姑蘇區定制汽車內飾包覆生產線銷售電話 2025-12-09
- 昆山優勢隧道烘烤線銷售 2025-12-09
- 湖南機箱散熱折疊翅片加工 2025-12-09
- 成都箱貨360度全景影像鳥瞰視角 2025-12-09
- 無為優勢智能駕駛輔助產品廠家直銷 2025-12-09
- 南京進口三維掃描服務哪家專業 2025-12-09