三合一角度偏差測量儀價格
故障模式知識庫匹配設備內置**系統知識庫,涵蓋ISO1940、API610等標準中的典型故障模式。例如,當檢測到角度偏差>°且振動頻譜出現2X峰值時,系統自動匹配“角度不對中”故障代碼,并關聯歷史案例庫中的解決方案(如調整墊片厚度、優化熱態預偏量)。數據融合決策樹通過多維度證據鏈交叉驗證機制,避**一數據誤判:激光對中發現偏差→振動分析確認頻譜特征→紅外熱像驗證溫升→系統綜合判定故障根源。某鋼廠軋機維護中,系統通過此機制識別出“角度偏差+齒輪嚙合不良”的復合故障,避免了*依賴振動數據可能導致的漏判。動態補償模型優化基于自適應機器學習算法,系統可自動修正環境干擾(如溫度變化、基礎沉降)對測量結果的影響。例如,設備內置溫度傳感器(精度±℃),結合材料膨脹系數數據庫,實時補償熱脹冷縮導致的軸系形變。某煉油廠應用中,該功能將高溫場景下的熱態偏差從±±。漢吉龍SYNERGYS角度偏差測量定時巡檢儀適用于哪些行業和設備?三合一角度偏差測量儀價格

法蘭角度偏差測量儀的測量精度并非固定不變,而是受儀器自身性能、環境條件、操作規范性、被測對象狀態四大類因素綜合影響。這些因素可能單獨或疊加作用,直接導致測量結果出現偏差,甚至超出儀器標稱精度范圍。以下是具體影響因素及作用機制的詳細分析:一、儀器自身性能與硬件配置因素儀器的**硬件設計和制造精度是決定測量精度的“基礎門檻”,也是**根本的影響因素,主要包括:**傳感部件精度法蘭角度測量儀的**通常是激光發射器、光電接收器(如CCD/PSD)、數字傾角儀,其精度直接決定測量上限:激光發射器:若激光束存在“漂移”(如長期使用后光斑偏移)、“發散”(光束直徑隨距離增大過快),或波長穩定性差,會導致基準線偏移,進而引入角度偏差(例如激光束每偏移,在1米測量距離下會對應°的角度誤差);光電接收器:CCD/PSD的像素分辨率(如百萬像素vs幾十萬像素)、響應速度、信號噪聲抑制能力,決定了對激光光斑中心定位的精度——分辨率越低,越難捕捉微小位移,角度計算誤差越大;數字傾角儀:若內置傾角儀的標稱精度低(如±°vs±°),或溫度漂移系數大,會導致儀器自身傾斜修正不準確,尤其在測量大直徑法蘭時,微小的傾角誤差會被放大為***的角度偏差。 三合一角度偏差測量儀價格漢吉龍SYNERGYS角度偏差測量低噪儀 運行無噪音,實驗室檢測更適用。
漢吉龍SYNERGYS角度偏差測量定時巡檢儀的測量精度受多維度因素影響,需從環境、設備、操作、維護等方面綜合把控。以下結合技術原理與實際應用場景展開分析:一、環境因素溫度波動溫度變化會導致金屬部件熱脹冷縮,改變激光傳播路徑和軸系幾何關系。例如,鋼材料的線膨脹系數約為11×10??/℃,溫度每變化1℃,1米長軸可能產生。儀器雖內置溫度傳感器和動態補償算法(如AS500型號通過雙激光束實時監測熱膨脹),但極端溫度(-20℃~50℃)或快速溫變(如石化高溫泵啟停)仍可能導致瞬時偏差。建議在環境溫度波動≤5℃時測量,并提前輸入設備材料膨脹系數以優化補償模型。振動與電磁干擾設備運行或外部機械振動會導致傳感器位移,干擾激光束穩定性。例如,鋼鐵廠軋機環境中的振動可能引發數據跳變。儀器通過三層電磁屏蔽(金屬法拉第籠+導電橡膠密封圈+軟件濾波算法)將信噪比提升至85dB以上,并支持抗干擾模式(如AS500),但在強磁場源(如變頻器)附近仍需使用屏蔽線纜連接傳感器。濕度與粉塵高濕度可能導致光學元件結露,粉塵會散射激光能量。雖然儀器具備IP54防護等級,但在粉塵密集環境(如水泥廠)需定期清潔30mmCCD探測器表面,避免光斑能量衰減。
AS熱補償角度偏差測量儀通過溫度實時監測與動態模型修正的深度融合,在寬溫環境下實現了角度測量精度的**性突破。其**技術在于將溫度數據作為**變量納入測量算法,通過熱膨脹系數數據庫與自適應補償模型,消除因環境溫度波動(如±50℃溫差)導致的光學路徑形變與機械結構熱脹冷縮誤差。以下從技術架構、應用場景、性能優勢及行業價值展開詳細解析:一、熱補償技術原理與實現路徑1.多維度溫度感知系統分布式溫度傳感器網絡:設備內置高精度NTC熱敏電阻(精度±℃)與紅外溫度傳感器(熱靈敏度<50mK),分別監測環境溫度與被測物體表面溫度。例如,在電機軸系檢測中,紅外傳感器可實時捕捉軸承區域的局部溫升(如>80℃預警),而NTC傳感器監測環境溫度變化趨勢。材料熱膨脹系數(CTE)數據庫:預存鋼(×10??/℃)、鋁(×10??/℃)、陶瓷(3×10??/℃)等20余種材料的熱膨脹參數。當被測設備由多種材料構成時(如鋼軸+鋁聯軸器),系統自動匹配對應CTE值,計算各部件的熱變形量。 漢吉龍SYNERGYS角度偏差測量培訓教材 詳解測量原理與操作,助力技能提升。

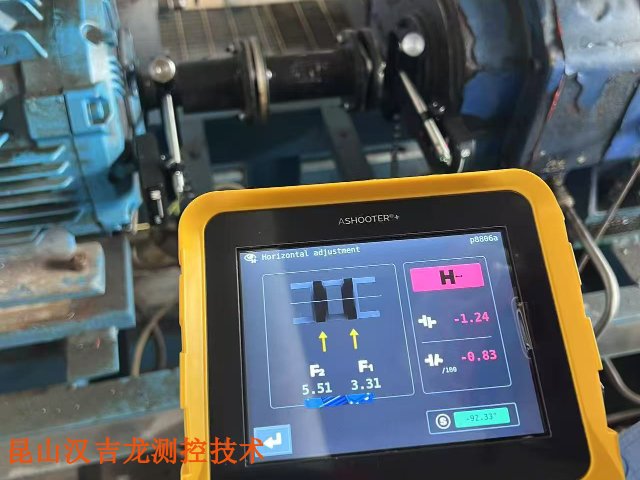
盤車范圍與數據采集儀器采用連續掃描法,需在90°-120°范圍內盤車以采集多位置數據。若盤車角度不足或軸轉動不平穩,可能導致數據代表性不足。例如,大型機組需確保軸系自由轉動,避免因卡澀造成測量盲區。參數設置與算法依賴初始參數輸入:軸間距(L)、聯軸器直徑(D)等基礎數據需準確錄入,否則自動生成的墊片調整方案可能偏差***。例如,某煉油廠案例中因軸間距輸入錯誤,導致熱態對中偏差擴大3倍。智能補償局限性:雖然儀器能自動修正熱膨脹和軟腳誤差,但在復雜工況(如多支點軸系)中,仍需結合人工經驗判斷補償結果的合理性,避免算法誤判。四、儀器硬件與維護因素傳感器性能PSD/CCD雙模態傳感:30mm高分辨率CCD探測器(1280×960像素)的精度依賴于激光束能量中心的穩定性。若光學部件污染(如指紋、灰塵),可能導致光斑定位誤差超過。數字傾角儀校準:傾角儀長期使用后可能因機械磨損出現零點漂移,需定期通過標準水平臺校準,確保角度測量精度≤±°。固件與校準狀態軟件算法優化:固件更新可提升環境適應性(如更精細的溫度補償模型)。例如,某鋼廠升級AS500固件后,高溫場景下的熱態偏差從±±。定期校準驗證:建議每6個月或使用500次后進行***校準。 一鍵測量角度偏差儀 簡化操作流程,角度檢測一鍵完成。三合一角度偏差測量儀價格
AS微型設備角度偏差測量儀 、適配微型電機,角度檢測更精細。三合一角度偏差測量儀價格
汽車制造-動力總成裝配線場景需求:多臺伺服電機同步驅動變速箱裝配機器人,需實時監控各電機角度偏差,避免齒輪嚙合不良導致的噪音與壽命縮短。方案實施:部署12臺SYNERGYS測量儀,通過時間同步模塊(PTP協議)確保數據采集精度<1ms。EMS平臺實時對比各電機角度曲線,當角度差>±°時,系統自動調整機器人運動軌跡,將變速箱裝配精度從±°提升至±°,異響發生率降低70%。2.半導體-晶圓傳輸系統場景需求:潔凈室環境下,晶圓機械臂需在-20℃~40℃寬溫域內保持角度定位精度±°,以避免晶圓破損。方案實施:測量儀集成高精度NTC熱敏電阻(精度±℃)與紅外溫度傳感器,實時修正熱膨脹導致的角度偏差。EMS平臺通過數字孿生模型模擬不同工況下的機械臂運動,**角度超調風險,使晶圓破損率從降至。 三合一角度偏差測量儀價格
- 提升機現場動平衡服務檢測erbessd-instruments 2025-12-06
- 提升機疏水閥故障檢測服務怎么做 2025-12-06
- 泵浦疏水閥故障檢測服務erbessd-instruments 2025-12-06
- 昆山現場動平衡服務檢測VAST 2025-12-06
- 關鍵設備壓縮氣體泄漏檢測服務圖片 2025-12-06
- 空壓機壓縮氣體泄漏檢測服務作用 2025-12-05
- 動力壓縮氣體泄漏檢測服務HOJOLO 2025-12-05
- PDM現場動平衡服務檢測ASHOOTER 2025-12-05
- 上門現場動平衡服務檢測周期 2025-12-05
- 工廠壓縮氣體泄漏檢測服務方法 2025-12-05
- 楊浦區名優儀器儀表銷售行價 2025-12-06
- 貴州教學真空泵維修供應商 2025-12-06
- 上海遠程等離子源處理cvd腔室RPS射頻電源 2025-12-06
- 蘇州工業車速傳感器價格咨詢 2025-12-06
- 銅合金光譜儀重金屬分析儀器 2025-12-06
- 靜安區質量溫控表保養 2025-12-06
- 石家莊直讀式水表多少錢一個 2025-12-06
- 深圳實驗室可調光源 2025-12-06
- 常州光譜儀分析儀品牌 2025-12-06
- 徐匯區優勢電壓表廠家供應 2025-12-06