工業快速對中校正儀怎么用
經過提純的有效數據,會傳輸至儀器的**運算單元(通常為高性能MCU或FPGA芯片),通過“對中偏差**算法”實時計算出**終的偏差值,這是實現“實時顯示”的**邏輯:1.**算法:基于“兩點法”或“多點法”的偏差計算對中校正的本質是通過“軸系上兩個點的位置”推算出“整個軸的偏差”,主流采用兩類成熟算法,運算速度均在毫秒級(<10ms),確保實時性:兩點法(簡化算法):在主動軸、從動軸上各取1個測量點(共2個點),通過傳感器采集這兩個點在“水平、垂直”方向的位置坐標,再根據“兩軸中心距”(提前輸入儀器),計算出“徑向偏差”(兩軸中心點的距離差)和“角度偏差”(兩軸軸線的夾角)。例:若主動軸測量點坐標為(X1,Y1),從動軸測量點坐標為(X2,Y2),中心距為L,則徑向偏差=√[(X2-X1)2+(Y2-Y1)2],角度偏差=arctan[(Y2-Y1)/L](垂直方向角度)。多點法(高精度算法):在主動軸、從動軸上各取3-6個測量點(沿軸周向均勻分布,如0°、90°、180°、270°),采集所有點的位置坐標,通過“**小二乘法”擬合出“主動軸軸線”和“從動軸軸線”的空間直線方程,再計算兩條直線的“平行偏移量(徑向偏差)”和“夾角(角度偏差)”。“設備振動異響?軸承總磨損?—— 快速對中校正儀。工業快速對中校正儀怎么用
第二步:信號處理模塊消除干擾,提純有效數據工業現場的振動、電磁干擾(如電機電磁場)、溫度變化會導致傳感器采集的原始電信號包含“噪聲”(無效干擾信號),若直接運算會導致偏差顯示不準確。因此儀器內置實時信號處理模塊,通過3類技術提純數據:濾波處理:采用“數字低通濾波”或“自適應濾波”算法,過濾掉高頻振動干擾(如設備運行時的1000Hz以上振動信號)和電磁噪聲,保留與“軸系偏差”相關的有效信號(通常為低頻信號,<100Hz)。溫度補償:傳感器的靈敏度會隨溫度變化(如溫度每升高10℃,靈敏度可能變化),儀器內置溫度傳感器,實時采集環境溫度和探頭溫度,通過預設的“溫度補償算法”修正采集數據,避免因溫度波動導致的偏差(如高溫環境下,自動修正“因探頭熱脹冷縮導致的測量誤差”)。數據校準:儀器出廠前會通過“標準軸系校準臺”(精度達μm)進行標定,存儲“傳感器信號與實際偏差”的對應關系;采集過程中,會實時調用標定數據,將原始電信號轉化為“真實的偏差值”(如將“”對應為“徑向偏差”)。 快速對中校正儀貼牌快速對中校正儀的傳感器精度有多高?
第二步:高精度數據采集(**環節)該環節通過發射單元與接收單元的協同,實時采集兩軸在旋轉過程中的位置變化數據,**依賴激光傳感技術或電容/電感位移傳感技術(主流為激光,精度更高),具體原理如下:激光傳感原理:發射單元內置高精度激光發射器,向接收單元發射一束線性激光;接收單元內置CMOS/CCD感光芯片(類似相機傳感器),可精確捕捉激光光斑的位置坐標。當兩軸存在偏差時,軸旋轉過程中發射單元與接收單元的相對位置會發生變化,導致激光光斑在感光芯片上的坐標同步偏移——偏差越大,光斑偏移量越大。數據采樣頻率:為避**次采樣的偶然性誤差,儀器通常以100-1000Hz的頻率連續采樣(即每秒采集100-1000組光斑坐標數據),并自動過濾異常值(如粉塵遮擋導致的瞬時光斑丟失),確保數據穩定性。多方位采集:部分機型支持“3點采樣”“4點采樣”或“連續旋轉采樣”(如旋轉360°全程采集),通過多組位置數據構建兩軸的空間位置模型,避免因單一角度采樣導致的偏差誤判(例如*采集0°和180°數據,可能遺漏90°方向的徑向偏移)。
計算機:通過USB數據線等連接方式,可將快速對中校正儀與計算機連接,把校準數據傳輸到計算機上進行存儲。如漢吉龍ASHOOTER-AS500激光對中儀,可通過USB輸出數據,在PC端進行數據處理與報告定制,方便存檔與追溯。云端平臺:一些先進的快速對中校正儀支持將數據上傳至云端平臺。通過云端存儲和管理,用戶可以在不同的地點、不同的設備**問和查看校準數據,實現數據的共享和協同管理。校正儀內置存儲器:大多數快速對中校正儀都具備內置存儲器,可直接將校準數據存儲在儀器內部。快速對中校正儀:工業對位標準化,校準質量有保障。

第三步:信號處理與坐標換算接收單元采集的“光斑坐標數據”是原始電信號,需通過儀器內置的微處理器(MCU/CPU)進行信號處理與坐標換算,將“光斑偏移量”轉化為“軸系偏差量”,**步驟包括:信號濾波:通過數字濾波算法(如卡爾曼濾波、滑動平均濾波)去除環境干擾(如振動、光線變化)導致的噪聲信號,保留真實的光斑偏移數據。坐標映射:儀器出廠前已通過校準,建立“光斑在感光芯片上的坐標偏移量”與“兩軸實際偏差量”的映射關系(例如:光斑在X軸偏移1mm,對應兩軸徑向偏差)。微處理器根據該映射關系,將實時采集的光斑坐標換算為兩軸的徑向位移值(平行偏差相關)和角度傾斜值(角度偏差相關)。單位統一:自動將換算后的偏差量轉換為工業常用單位(如mm、mil、度、分),避免人工換算誤差。快速對中校正儀校準數據的追溯管理如何實現?快速對中校正儀貼牌
快速對中校正儀:智能存儲校準數據,便于追溯管理。工業快速對中校正儀怎么用
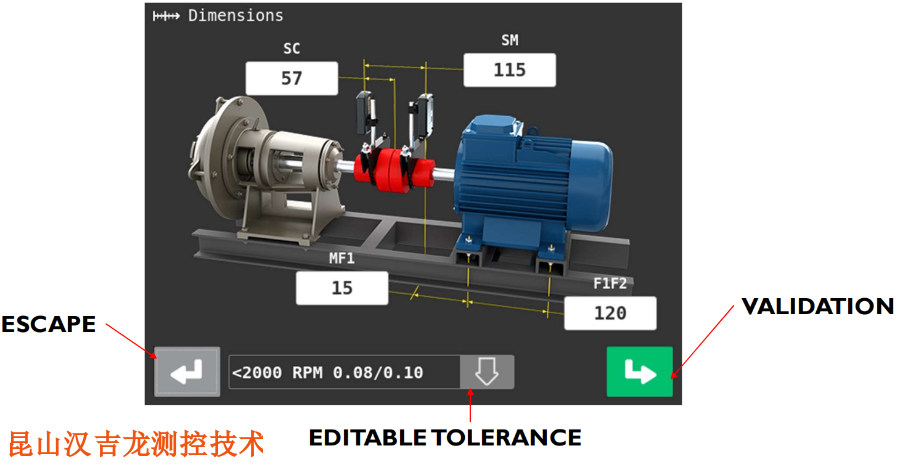
第四步:可視化模塊實時輸出,直觀呈現偏差運算得出的“徑向偏差、角度偏差”結果,會實時傳輸至儀器的顯示控制模塊,通過“圖形化+數字化”的方式直觀呈現,讓運維人員“一眼看懂”:硬件支撐:高刷新率顯示屏幕儀器通常配備“TFT彩色液晶屏”或“OLED屏”,刷新率≥60Hz(每秒顯示60幀畫面),確保偏差值和圖形的“實時刷新無延遲”——避免因屏幕刷新慢導致的“調整后偏差值滯后顯示”(如調整已到位,但屏幕仍顯示超標)。軟件呈現:多維度可視化設計顯示界面經過工業設計優化,兼顧“直觀性”和“信息密度”,常見呈現形式包括:數字實時顯示:用大號字體直接顯示“當前徑向偏差(如)”“角度偏差(如°)”,并標注“合格閾值”(如綠色字體顯示“≤”),偏差超標時自動變紅預警。圖形動態標注:用“軸系示意圖”實時標注偏差方向(如用紅色箭頭指向“左偏”方向),或用“柱狀圖”對比“當前偏差”與“合格閾值”(偏差縮小,紅色柱同步縮短)。調整指引提示:部分**型號會實時計算“調整量”(如“電機前腳需墊高”),并在屏幕底部彈出文字提示,實現“邊看偏差、邊做調整”。 工業快速對中校正儀怎么用
- 平爐疏水閥故障檢測服務供應商 2025-12-06
- 提升機現場動平衡服務檢測erbessd-instruments 2025-12-06
- 提升機疏水閥故障檢測服務怎么做 2025-12-06
- 服務疏水閥故障檢測服務電話 2025-12-06
- 泵浦疏水閥故障檢測服務erbessd-instruments 2025-12-06
- 輸送機現場動平衡服務檢測方法 2025-12-06
- 給水泵壓縮氣體泄漏檢測服務漢吉龍測控技術 2025-12-06
- 服務疏水閥故障檢測服務使用視頻 2025-12-06
- 平爐壓縮氣體泄漏檢測服務人員招聘 2025-12-06
- 軋輥壓縮氣體泄漏檢測服務哪家強 2025-12-06
- 陜西金剛石落錘沖擊試驗機廠家 2025-12-06
- 山東智能化顯微CT推薦咨詢 2025-12-06
- 低溫電磁流量計價格 2025-12-06
- 無錫振動分析儀 2025-12-06
- 四川哪里有賣數字圖像相關非接觸變形測量 2025-12-06
- 手提合金不銹鋼材料分析光譜儀 2025-12-06
- 錫山區位移傳感器品牌 2025-12-06
- 浙江VIC-2D數字圖像相關總代理 2025-12-06
- 山西防曬指數測試儀廠家 2025-12-06
- 自動化產線適配光纖傳感器維保 2025-12-06