湖南極座標型重負載直交機械手模具廠家
直交機械手與工業的融合:工業時代的到來,為直交機械手的發展帶來了新的機遇與挑戰。直交機械手作為工業自動化的關鍵設備,正深度融入工業的智能生產體系。通過與物聯網技術的結合,機械手能夠實時采集自身的運行數據,并將這些數據上傳至工業互聯網平臺,實現設備狀態的遠程監控與管理。同時,借助大數據分析與云計算技術,可對機械手的運行數據進行深度挖掘,預測設備故障,提前進行維護,提高生產的可靠性與穩定性。在智能工廠中,直交機械手能夠與其他智能設備實現互聯互通,根據生產任務的需求自動協調工作,形成高效、協同的生產流程,推動工業生產向智能化、自動化、柔性化方向邁進。 直坐標機械手安裝調整要求低,操作簡單,維護方便!湖南極座標型重負載直交機械手模具廠家
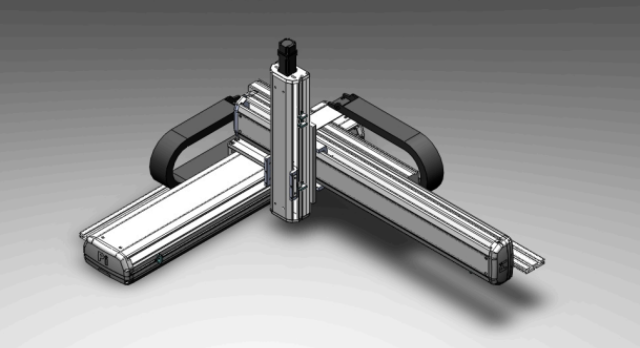
直交機械手的結構設計精妙,以直角坐標系為基礎構建運動框架。其主體框架通常選用**度鋁合金或鋼材打造,確保在運行時擁有足夠的剛性,降低形變風險。X、Y、Z軸的傳動方式豐富多樣,常見的有滾珠絲杠傳動與同步帶傳動。滾珠絲杠傳動憑借高精度、高剛性的優勢,在對定位精度要求嚴苛的場景中廣泛應用;同步帶傳動則以高速度、長行程以及低成本的特點,在一些對速度和行程有較高要求的場合備受青睞。各軸的滑塊與導軌之間配合精密,能夠有效減少運動過程中的摩擦與振動,保障機械手平穩、精細地運行,為其在工業生產中的高效作業奠定堅實基礎。 海南十字型中負載直交機械手廠家能夠更改速度?加速度的直交機械手,靈活調整,適配不同任務!
在電子制造行業,直交機械手發揮著無可替代的關鍵作用。電子元件普遍體積微小且精度要求極高,直交機械手能夠精細地完成元件的拾取、放置與組裝任務。以手機主板生產為例,機械手可快速、準確地將芯片等微小元件貼裝至指定位置,其高精度的定位能力極大地降低了元件貼裝的誤差率,有效提升了產品質量與生產效率。在電子產品的檢測環節,直交機械手能夠靈活地抓取產品,使其在不同檢測設備間流轉,確保每一個產品都能接受***、細致的檢測,有力保障了電子產品的性能與可靠性,推動電子制造行業朝著自動化、精細化方向持續發展。
直交機械手的動力驅動系統主要由電機和傳動裝置組成。常見的電機類型有伺服電機、步進電機等。伺服電機具有響應速度快、控制精度高、運行平穩等優點,能夠精確控制機械手的運動速度和位置,適用于對運動性能要求較高的應用。步進電機則成本相對較低,在一些對精度要求不是特別苛刻的場合有廣泛應用。傳動裝置將電機的旋轉運動轉化為機械手的直線運動,如前面所述的滾珠絲桿傳動,還有同步帶傳動等。同步帶傳動具有傳動效率高、噪音低、無需潤滑等特點,但其精度相對滾珠絲桿傳動略低。合理選擇電機和傳動裝置,能夠根據直交機械手的具體應用需求,實現比較好的動力性能和性價比。 龍門式直交機械手,穩固可靠,適合大型物件搬運!
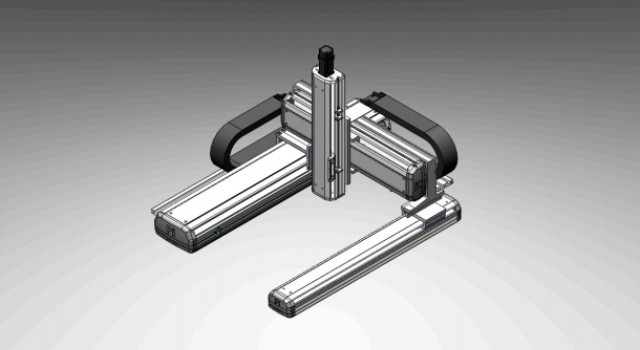
直交機械手的基本原理:直交機械手作為工業自動化的關鍵設備,其工作原理基于直角坐標系。通過X、Y、Z軸的單獨運動組合,實現準確的三維空間定位。以常見的螺桿型直交機械手為例,它主要由螺桿傳動系統、導軌、控制系統與執行機構構成。螺桿傳動系統利用螺桿和螺母的配合,將電機的旋轉運動轉化為直線運動,以此驅動機械手沿水平或垂直方向平穩移動。導軌則為機械手的運動提供穩定支撐與導向,保證運動的精度和直線度。控制系統如同機械手的“大腦”,精確調控各軸的運動軌跡、速度及加速度,從而實現對工件的精確抓取、搬運與放置等操作。這種基于直角坐標的運動方式,使直交機械手能夠在復雜的工業環境中高效、準確地完成各類任務。 于高速高精度重復搬運任務里,直交機械手游刃有余,高效快捷!吉林懸臂型輕負載直交機械手模組
架在設備上方的直坐標機械手,不占地面空間,規劃便利!湖南極座標型重負載直交機械手模具廠家
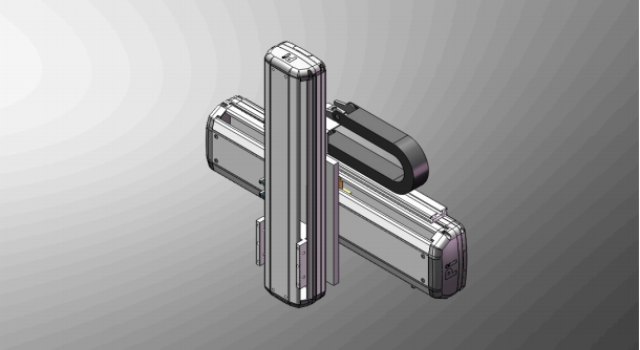
直交機械手的精度控制技術精度是直交機械手的關鍵性能指標之一。為實現高精度控制,一方面在機械結構上采用高精度的滾珠絲桿、直線導軌等部件,并嚴格控制加工精度和裝配精度,減少機械間隙帶來的誤差。另一方面,在控制系統中運用先進的算法和傳感器技術。例如,通過高精度的編碼器實時監測電機的旋轉角度,進而精確計算機械手的位置,當檢測到位置偏差時,控制系統迅速做出調整,確保機械手始終按照預設軌跡運動。此外,還可采用誤差補償技術,對機械結構的固有誤差以及運行過程中因溫度變化、負載變化等因素產生的誤差進行補償,從而進一步提高直交機械手的定位精度,滿足對精度要求極高的應用場景,如精密儀器制造、生物醫療設備生產等。 湖南極座標型重負載直交機械手模具廠家
- 貴州雙調速絕緣套管上漆生產線故障維修 2025-12-07
- 鄭州FESTO型倍速鏈阻擋氣缸價格哪家優惠 2025-12-07
- 山西購買琛鑫輕創營實訓用戶體驗 2025-12-07
- 閔行區實驗室家具誠信合作 2025-12-07
- 常州通用儀器儀表交易價格 2025-12-07
- 3型液壓力矩扳手螺栓安裝視頻 2025-12-07
- 浙江無框智能開關對比價 2025-12-07
- 沈陽耐腐蝕導熱油鍋爐廠家直銷 2025-12-07
- 杭州智能導熱油鍋爐價格 2025-12-07
- 貴州換熱器供應商家 2025-12-07