湖北極座標型重負載直交機械手模組
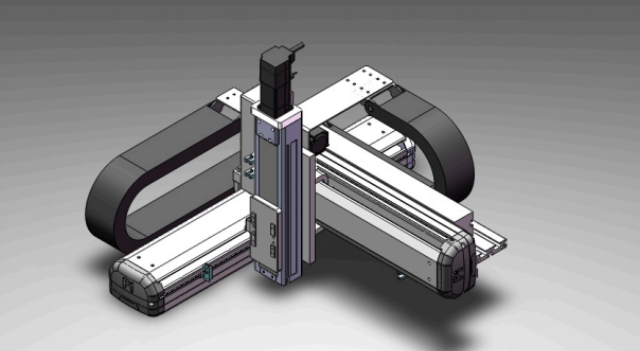
直交機械手的基本原理:直交機械手作為工業自動化的關鍵設備,其工作原理基于直角坐標系。通過X、Y、Z軸的單獨運動組合,實現準確的三維空間定位。以常見的螺桿型直交機械手為例,它主要由螺桿傳動系統、導軌、控制系統與執行機構構成。螺桿傳動系統利用螺桿和螺母的配合,將電機的旋轉運動轉化為直線運動,以此驅動機械手沿水平或垂直方向平穩移動。導軌則為機械手的運動提供穩定支撐與導向,保證運動的精度和直線度。控制系統如同機械手的“大腦”,精確調控各軸的運動軌跡、速度及加速度,從而實現對工件的精確抓取、搬運與放置等操作。這種基于直角坐標的運動方式,使直交機械手能夠在復雜的工業環境中高效、準確地完成各類任務。 可將直交機械手視為執行單元,靈活搭配,方便實用!湖北極座標型重負載直交機械手模組
在醫療設備制造領域,直交機械手發揮著至關重要的作用。醫療設備的制造對精度和潔凈度要求近乎苛刻,直交機械手能夠在無塵、無菌的環境中準確作業。在醫療器械的組裝過程中,機械手可將微小的零部件準確安裝至相應位置,確保醫療器械的性能穩定可靠。例如,在心臟起搏器等精密醫療器械的生產中,直交機械手的高精度操作能夠有效避免人工組裝可能產生的誤差,提高產品質量與安全性。在醫療檢測設備中,直交機械手可實現樣本的自動抓取與轉移,提升檢測效率與準確性,為醫療設備制造行業的發展注入強大動力,推動醫療技術不斷進步。 遼寧極座標型重負載直交機械手定制服務直交機械手在自動化設備準確定位中大展身手,定位準確,分毫不差!
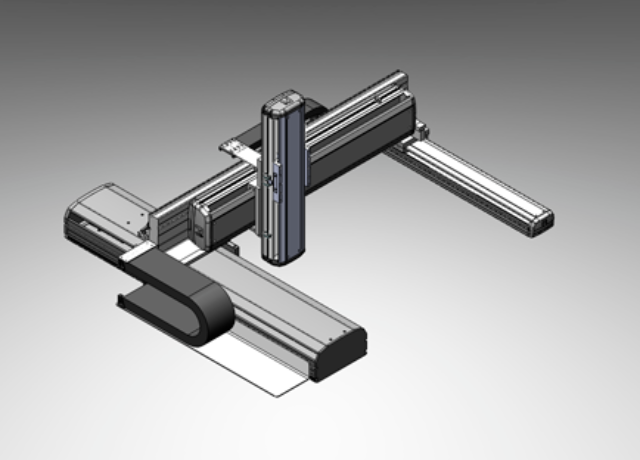
直交機械手的機械結構剖析:直交機械手的機械結構猶如其堅實的骨架,支撐著各項功能的實現。其主體框架通常選用**度的鋁合金或鋼材打造,確保在運行過程中具備***的剛性與穩定性,有效抵御振動與變形。傳動部分常見的有滾珠絲杠和同步帶兩種形式。滾珠絲杠憑借高精度、高負載能力的特性,適用于對定位精度要求嚴苛的作業場景;同步帶則以其高速、低噪音的優勢,在追求高效運行的場合大顯身手。導軌系統如同機械手的“軌道”,保障運動部件平穩順滑地移動,減少摩擦與磨損,延長設備使用壽命。而滑塊、連接件等部件則各司其職,緊密協作,共同構建起直交機械手精密且可靠的機械結構體系。
直交機械手在醫療行業的應用挑戰與解決方案:醫療行業對設備的精度、可靠性以及安全性要求極高,直交機械手在該領域的應用面臨諸多挑戰。首先,醫療環境對設備的潔凈度要求苛刻,直交機械手需要具備良好的防塵、防細菌設計,以防止細菌滋生與傳播。為此,可采用特殊的表面處理工藝,使機械手表面光滑且不易吸附灰塵與細菌,同時在結構設計上減少易積塵的縫隙與角落。其次,醫療操作往往涉及高精度的動作,如微創手術中的器械操作,這對機械手的定位精度與運動穩定性提出了極高要求。通過采用更高精度的傳感器、優化控制算法以及提升機械結構的剛性等措施,能夠有效提高機械手的精度與穩定性。此外,醫療設備的安全性至關重要,直交機械手需要配備多重安全防護裝置,如急停按鈕、安全光幕等,確保在使用過程中不會對醫護人員與患者造成傷害。 聯軸結構設計,讓直交機械手維護簡便,降低成本,豈不妙哉?
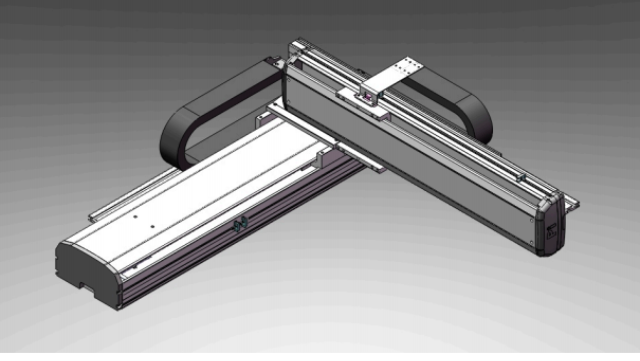
直交機械手的驅動與控制系統:驅動系統堪稱直交機械手的“動力心臟”,常見的驅動方式包括電機驅動與氣動驅動。電機驅動中,伺服電機憑借其準確的轉速與位置控制能力,成為主流選擇,能夠使機械手實現微米級別的定位精度,滿足精密裝配、電子加工等行業的高要求。氣動驅動則以其響應速度快、成本較低的特點,在一些對精度要求相對不高、但追求快速動作的場合得到應用,如物料搬運的初級階段。控制系統則像是機械手的“大腦”,通過編寫特定的程序,能夠精確控制驅動系統的運行,協調各軸的運動,實現復雜的動作組合與任務流程。同時,先進的控制系統還具備故障診斷、參數調整等功能,方便操作人員進行設備維護與優化。 直交機械手的 4 列圓弧溝槽導軌,抗大力矩載荷,堅固耐用,性能優越。湖北極座標型重負載直交機械手模組
直坐標機械手采用強度高結構鋼,強度高,振動搖晃全無!湖北極座標型重負載直交機械手模組
隨著科技的不斷進步,直交機械手在未來將呈現出一系列新的發展趨勢。一方面,在精度和速度上會有更大突破。研發人員將通過改進材料、優化結構設計以及采用更先進的控制算法,使直交機械手的定位精度向亞微米甚至納米級邁進,同時進一步提升其運動速度,滿足如半導體制造中對超精細、超高速加工的需求。另一方面,智能化程度將大幅提升。借助人工智能、機器學習等技術,直交機械手將具備自主學習和自適應能力,能夠根據生產過程中的實時數據,自動優化運動軌跡和操作流程,應對復雜多變的生產任務。此外,模塊化設計也將成為趨勢,通過標準化的模塊組合,可快速定制出滿足不同行業、不同應用場景需求的直交機械手,降低研發和生產成本,縮短產品交付周期,為各行業的自動化升級提供更便捷、高效的解決方案。 湖北極座標型重負載直交機械手模組
- 汕頭模組 2025-12-08
- 繼電器模組多少錢 2025-12-08
- 深圳封閉式模組模組 2025-12-08
- 惠州傳感器模組工廠 2025-12-08
- 云南模組 2025-12-08
- 北京傳感器模組哪家好 2025-12-08
- 高精度模組哪家好 2025-12-08
- 深圳電容模組定制服務 2025-12-08
- 深圳模組多少錢 2025-12-08
- 廣西傳感器模組多少錢 2025-12-07
- 重慶正規力控系統 2025-12-08
- 智能餅干夾心機可調餅干寬度 2025-12-08
- 學校實驗室吊柜廠家 2025-12-08
- 青海點型四合一氣體檢測儀按需設計 2025-12-08
- 西南J1772放電槍安裝 2025-12-08
- 江西螺桿型空氣壓縮機 2025-12-08
- 湖南微型絲桿滑臺生產廠家 2025-12-08
- 吉林12V全直流變頻房車空調 2025-12-08
- 惠山區本地壓鑄式液冷裝置哪個好 2025-12-08
- 揚州中走絲線切割生產廠家 2025-12-08