天津工業機器人裝配電機
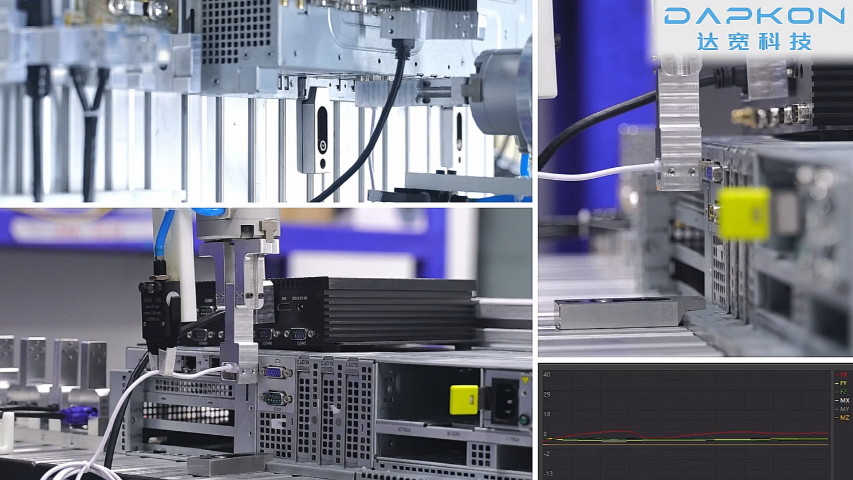
齒輪裝配過程中,產品一致性是衡量生產質量的重要因素。達寬科技的機器人力控裝配技術通過力位混合控制功能,為企業提供了可靠的工藝保障。傳統裝配方式常因操作人員經驗差異或設備剛性不足,導致齒輪裝配質量不穩定。而達寬科技的力控裝配系統利用高精度傳感器,實時監測力與位置數據,能夠動態調整機器人動作,確保每個齒輪在一致的力學條件下完成裝配。這種技術優勢使齒輪與軸孔的嚙合更加可控,減少了因公差或夾具誤差導致的裝配偏差。達寬科技的力控裝配模塊支持多種復雜工況,例如不同齒輪類型或材質的組合,能夠通過自適應調節保持裝配穩定性。企業在采用達寬科技的力控裝配方案時,可以有效降低因質量不一致導致的廢品率,從而節約生產成本。此外,該系統提供的數據記錄功能支持生產過程的可追溯性,便于企業進行質量管理和工藝改進。無論在小批量生產還是大規模流水線作業中,達寬科技的機器人力控裝配都能為企業提供穩定可靠的支持,幫助滿足市場對高質量齒輪產品的需求。達寬科技力控模組可集成現有產線,賦予傳統設備柔性裝配能力。天津工業機器人裝配電機
達寬科技的力控裝配方案在提升生產效率方面表現突出。在軸孔裝配中,人工操作不僅速度有限,還容易因疲勞導致效率波動,而普通機器人若缺乏力控能力,可能需要頻繁停機調整參數。力控裝配則能讓機器人在遇到偏差時自主修正,減少停機次數,保持穩定的裝配節奏。這種連續性不僅節省了因調整而浪費的時間,還能讓整條生產線的流轉更加順暢,從側面為企業節省了時間成本,讓生產計劃得以更高效地推進。
對于追求產品質量穩定性的企業而言,達寬科技的力控裝配方案是理想選擇。軸孔裝配的一致性直接影響產品的整體性能,人工裝配時,不同操作人員的手法差異可能導致裝配精度參差不齊。而力控裝配通過標準化的力反饋調節機制,確保每一次軸孔對接的力度和位置都處于預設范圍內,有效降低了因人為因素造成的產品差異。這種穩定的裝配質量,讓企業生產的產品在性能上更具可靠性,有助于提升企業在市場中的口碑,為企業的長遠發展奠定堅實基礎。 甘肅機器人自動化裝配解決方案達寬力控系統維持生產穩定,機器人穩定作業,確保齒輪裝配流程順暢進行。
達寬科技作為機器人力控裝配領域的企業,多年來一直專注于力控技術的研發與創新應用,致力于為全球制造業提供先進的力控裝配解決方案。憑借雄厚的技術實力和豐富的行業經驗,達寬科技不斷突破技術瓶頸,研發出了一系列高性能的力控裝配產品,涵蓋了從傳感器、控制器到機器人集成系統的完整解決方案。公司擁有一支由行業精英組成的研發團隊,他們深耕力控技術多年,對裝配工藝有著深刻的理解和獨到的見解,能夠根據客戶的特定需求,量身定制適合的力控裝配方案。同時,達寬科技還建立了完善的售后服務體系,為客戶提供的技術支持和培訓服務,確保客戶能夠快速掌握并穩定運行力控裝配系統。在市場競爭日益激烈的,達寬科技始終堅持以技術創新為驅動力,不斷優化產品性能,提升服務質量,與眾多企業建立了長期穩定的合作關系,共同推動制造業向智能化、高效化方向發展,為實現工業4.0的宏偉目標貢獻著自己的力量。
在機械制造領域,齒輪裝配一直是一項對精度和穩定性要求極高的工作。傳統的齒輪裝配方式,往往依賴于人工操作或固定的自動化設備,難以應對齒輪尺寸的微小差異和裝配過程中的不確定性,容易導致裝配效率低下、產品質量參差不齊等問題。達寬科技的機器人力控齒輪裝配方案,為這一難題提供了創新而有效的解決方案。力控裝配技術通過在機器人上安裝高精度的六軸力傳感器,使機器人能夠實時感知裝配過程中齒輪所受的力,并根據預設的力控算法自動調整裝配動作。當齒輪與軸進行嚙合時,機器人可以根據實際受力情況,靈活地進行微調,確保齒輪能夠準確無誤地安裝到位。這種精細的力控能力,不僅避免了因力過大而導致的齒輪損壞,還能夠有效解決因齒輪或軸的尺寸偏差而造成的裝配困難,極大地提高了裝配的成功率和穩定性,為制造企業帶來了更高效、更可靠的齒輪裝配體驗。力控裝配讓復雜線束裝配有序,達寬力控助力機器人實現準確裝配。

行星齒輪裝配的復雜性源于其多齒嚙合結構與嚴苛的軸向對位要求。傳統剛性機器人依賴高精度定位與定制化工裝,面對零件公差或批次差異時需頻繁停機調整,影響生產連續性。達寬科技的力控裝配系統通過六維力傳感器實時監測齒輪接觸面的微觀力變化,賦予機器人動態補償能力。例如行星架與太陽輪嵌套過程中,系統依據阻力曲線自動優化壓裝軌跡,補償位置偏差,無需人工干預即可完成平穩嚙合310。這種自適應特性大幅降低了對精密夾具的依賴,企業更換齒輪型號時需調用預設力控參數庫,省去機械重構時間,縮短換型周期。力控裝配的柔性特點尤其適配多品種小批量生產模式,助力企業靈活響應定制化訂單需求
力控裝配使線束裝配數據有跡可循,達寬系統助力生產管理水平提升。天津工業機器人裝配電機
力控裝配簡化復雜線束裝配工序,達寬力控讓機器人完成精細操作。天津工業機器人裝配電機
達寬科技力控裝配方案在提升生產效率上效果。齒輪裝配工藝復雜,人工操作時,每一次安裝都需仔細校準,過程緩慢且易因疲勞導致效率起伏。普通機器人若缺乏力控能力,面對不同批次齒輪的微小尺寸差異,只能依靠人工頻繁停機重新編程調試。而力控裝配讓機器人具備自主適應能力,在裝配不同齒輪時,無需人工過多干預,就能依據實時力反饋自動調整動作,持續高效地完成裝配任務。這不僅大幅節省了調整設備所耗費的時間,還使整個生產線的運轉更加連貫,讓企業能在更短時間內完成更多生產訂單,提高生產效率。
- 新疆工業機器人力控優勢 2025-12-08
- 上海機器人力控裝配零部件 2025-12-08
- 重慶工業機器人裝配齒輪 2025-12-08
- 寧夏機器人力控配置 2025-12-08
- 天津工業機器人裝配電機 2025-12-07
- 陜西自動化裝配電機 2025-12-07
- 吉林機器人柔性裝配方案 2025-12-07
- 安徽力控裝配解決方案 2025-12-07
- 安徽機器人自動化裝配方案 2025-12-07
- 裝配力控系統 2025-12-07
- 合格證打印機廠家 2025-12-08
- 遼寧zd888斑馬打印機全國供應 2025-12-08
- 紹興家庭影院互動投影機 2025-12-08
- 梅州教育一體機報價 2025-12-08
- 江蘇廣東北斗時間同步裝置服務器 2025-12-08
- 初中物理虛擬現實交互系統下載排名 2025-12-08
- 昆山使用CRT顯示器單價 2025-12-08
- 浙江海外倉系統哪個好用 2025-12-08
- 貴州高良率管控測試管理系統定制 2025-12-08
- 虹口區企業機房裝修工程 2025-12-08