山西靜態傾角儀供應商家
ENX392三軸向加速度計是ENX自主研發生產的應用***的加速度傳感器系列產品,可適用于振動測試,撞擊測試等多個領域。產品采用數字接口輸出,RS232/485/TTL可選,可設不同的地址碼,多個傳感器長距離串聯一起使用,便于多點測量和數據分析,內部FFT處理,可直接輸出物體振動頻率,速度及振幅,方便用戶分析數據。客戶可根據物體實際頻率,更改采樣頻率,以提高頻率測量精確度。
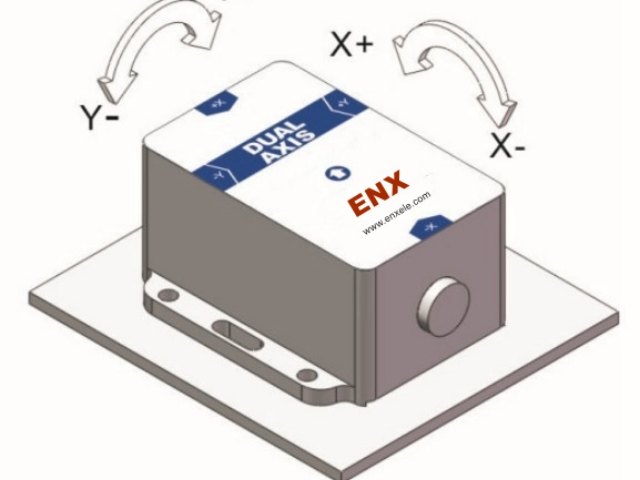
AKG392為單晶硅電容式傳感器,由一片經過微機械處理的硅芯片,用于信號調整的低功率ASIC,用于存儲補償值的微處理器,及溫度傳感器組成。此產品功耗低,經過標定,結構堅固,輸出穩定。新的電子配置為復位提供固態電源,為過電提供保護。在全量程范圍內比例因子的長期穩定性及偏差典型值小于0.1%。此系列產品具有結構堅固、功耗低、偏差穩定性優異等特點,保障了穩定的輸出可靠性。 恩曉電氣深耕傾角儀,創新研發,為各行業提供可靠測角方案。山西靜態傾角儀供應商家

分辨率高,抗噪聲能力強,溫度偏移穩定;采用先進的硬鐵和軟鐵校準算法,并使用高精度加速度計進行傾斜補償,使其橫滾角在360°的任何工具面都能提供高精度的航向信息。在有固定干擾的環境中,此款產品依然能保持較高的測量精度。長條形體積更適合鉆井測量;外形小巧和低功耗的特點,可以快速方便的集成到各種產品當中,該產品的訂貨可選擇帶完整封裝產品或電路單板。此產品集成了三軸磁場傳感器和三軸加速度傳感器,通過可靠性高,抗干擾能力強的工業單片機實時解算航向數據,以及使用三軸加速度計對大范圍內的傾斜角進行航向補償海南傾角傳感器傾角儀供應商家醫療、機器人領域,恩曉傾角儀以高精度賦能操作。
隨著測控技術的發展,系統要求的測控精度越來越高。然而,角度測量仍然存在各種各樣的問題,主要有:精度不夠高或只能在小角度測量時得到高精度,精度提高使產品尺寸和重量過大,全周界角度測量裝置的測量精度不高,小型化方面存在技術困難,動態范圍小,對關鍵元件要求苛刻,對環境要求高,可靠性低,不易實現與其它儀器融合等等。隨著科學技術的發展,航天及國民經濟中多種行業,對角度傳感器提出了越來越高的需求。在同等測量精度條件下,急需成本低、體積小、可靠性高的更新換代產品。新型角度傳感器將被測輸入角度值從空間域轉向時間域,從而完全擺脫了傳統光電編碼盤生產加工中所需的高精加工過程(造成生產成本居高不下),達到在同等精度條件下生產成本**降低,產品性能價格比**提高之目的。新型角度傳感器的生產成本只有傳統光電編碼盤的1/5左右,現已制成了新型角度傳感器試驗樣機。
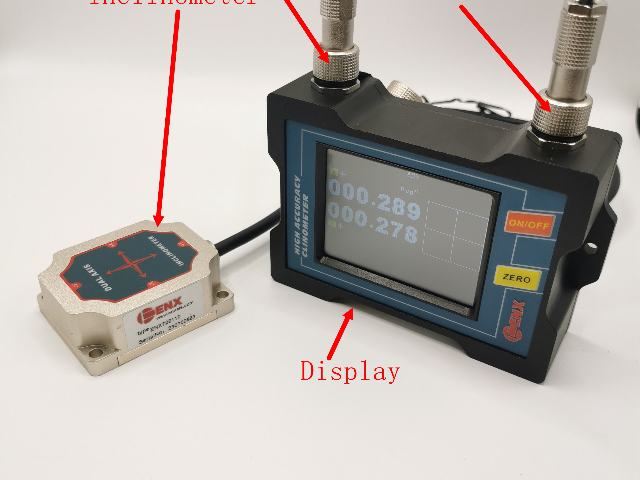
傾角儀的發展現狀精密角度測量是幾何量測量的一個重要項目,也是計量科學中發展較為完備的一個分支,在過去的20年中,角度測量的精度也提高了10倍多。角度測量技術分為靜態測量和動態測量兩種,某些靜態測量技術仍然是動態測量的基礎,一些動態測角技術可以實現靜態測量。很多重要的測控儀器,如陀螺轉臺、慣導平臺、經緯儀、星體***、雷達、導彈發射架、空間望遠鏡、高精度數控機床、機器人等系統中一般都需要角度傳感器,用于測量被測物體相對于某基準方位的***轉角或相對于自身在不同時刻的相對轉角。ENX7**是一款ENX基于MEMS慣性測量平臺開發的一款小體積IMU動態姿態儀,通過對陀螺儀的角速率進行動態姿態算法,實時輸出物體的水平方位角度、角速率及前進軸向體加速度。產品內部集成瑞芬公司的慣性導航算法,構建kalman濾波模型,實時反饋系統誤差防止系統發散,可有效抑制陀螺儀短時間漂移問題。該款產品專門用于機器人車,AGV車輛的方位導向,無人機的姿態控制等相關的使用場合,替代了傳統的機器人車用磁導條進行導向的缺點,無需在場地布置眾多的磁條,是下一代機器人車實現自動尋跡駕駛的必備導航組件。 ENX傾角儀顯示器一體式傾角儀。
ENX316T/ENX326T系列產品是ENX推出的新一代數字型小體積MEMS傾角傳感器,內置雙通道地球引力傾斜單元,通過測量靜態重力加速度,轉換成傾角變化。從而可以測量傳感器輸出相對于水平面的傾斜和俯仰角度。輸出方式CANOPEN。由于是內置MCU控制系統,使傳感器輸出線性度得到二次修正,彌補了模擬型的因為修正不夠導致的精度下降。本產品采用非接觸式測量原量,能實時輸出當前的姿態傾角,使用簡單,無需找回相對變化的兩個面安裝。是工業自動化控制、測量姿態的理想選擇,抗外界電磁干擾能力強、可適應在工業惡劣環境中長期工作。該產品主要適合靜態和慢速變化的動態測量,不適用于快速變化的動態測量。應用范圍
★電動盲人椅測平
★云臺運轉監控衛星天線定位
★醫療床調平汽車底盤測量四輪定位系統
★各種工程機械角度控制。 ENX620T-N由于系統集成了分辨率高的溫度傳感器,配合MCU處理系統再進行二次溫度補償.吉林動態傾角儀銷售電話
鉆井、稱重系統中,恩曉傾角儀保障作業精度與數據準確。山西靜態傾角儀供應商家
ENX750D是一款ENX基于MEMS慣性測量平臺開發的一款高精度陀螺轉角儀,通過對陀螺儀的角速率進行動態姿態算法,實時輸出物體的水平方位角度、角速率及前進軸向體加速度。產品內部集成瑞芬公司的慣性導航算法,構建kalman濾波模型,實時反饋系統誤差防止系統發散,可有效抑制陀螺儀短時間漂移問題。該款產品專門用于機器人車,AGV車輛的方位導向,無人機的姿態控制等相關的使用場合,替代了傳統的機器人車用磁導條進行導向的缺點,無需在場地布置眾多的磁條,是新一代機器人車實現自動尋跡駕駛的必備導航組件。ENX725D是一款專業針對農機自動架駛做導航應用的陀螺儀IMU,內置工業級三軸陀螺儀與三軸加速度計。該產品在農機的高振動特性情況下仍然能輸出平滑的姿態數據。基于MEMS慣性測量平臺開發的,通過對陀螺儀的角速率進行動態姿態算法,實時輸出物體的動態傾角,水平方位角度,三軸角速率,三軸加速度及前進軸向體加速度等數據;亦可通過Z軸單軸積分輸出,實時反饋計數輸出,使農機前輪精細轉角轉向;該款產品專門用于自動化農用機械,精細作業,提供效率,是新一代自動化精細農業控制的必備組件。 山西靜態傾角儀供應商家
- 青海動態傾角儀廠家供應 2025-12-06
- 新疆RS485輸出傾角儀供應商 2025-12-06
- 陜西動態傾角儀官方代理 2025-12-06
- 廣西4-20mA輸出傾角儀商家 2025-12-06
- 河北動態傾角儀銷售電話 2025-12-06
- 遼寧防爆型傾角儀銷售廠家 2025-12-06
- 四川無線信號輸出傾角儀產品介紹 2025-12-06
- 湖北傾角儀聯系方式 2025-12-06
- 天津無線信號輸出傾角儀產品介紹 2025-12-06
- 湖北RS485輸出傾角儀商家 2025-12-06
- 四川質量板對板連接器價格對比 2025-12-06
- 寧夏船舶壓力分布檢測選型 2025-12-06
- 福建進口絲包線 2025-12-06
- 中山萬兆網絡濾波器訂做 2025-12-06
- 江蘇新型機電組件設備量大從優 2025-12-06
- 江蘇定制物聯網控制板加工平臺 2025-12-06
- 貴州鎵電子元器件批發價 2025-12-06
- 江蘇哪里有漆包線工業 2025-12-06
- 廣西精密SMT貼片加工多少錢 2025-12-06
- 大規模ESP32-C6-WROOM-1U構件 2025-12-06