-
 嘉定區(qū)耐用磁浮備用軸承價格大全
嘉定區(qū)耐用磁浮備用軸承價格大全磁浮軸承傳感器的制造廠商主要有美國本特利,德國申克;國內(nèi)的企業(yè)有中國航空動力機(jī)械研究所屬下部門中國航空動力機(jī)械研究所科技開發(fā)中心,2013年11月14日,中國航空動力機(jī)械研究所正式被授予“磁懸浮軸承傳感器”的**,可在中華人民共和國知識產(chǎn)權(quán)局網(wǎng)查詢 [1]。在國內(nèi)隨著磁懸浮軸承傳感器的普及,其可以廣泛應(yīng)用于電力、石油、化工、冶金等科研單位。對汽輪機(jī)、水輪機(jī)、鼓風(fēng)機(jī)、壓縮機(jī)、空分機(jī)、齒輪箱、大型冷卻泵等大型旋轉(zhuǎn)機(jī)械軸的徑向振動、軸向位移、鍵相、軸轉(zhuǎn)速、偏心以及轉(zhuǎn)子動力學(xué)研究和零件尺寸檢驗(yàn)等進(jìn)行在線測量和保護(hù)。高速旋轉(zhuǎn)機(jī)械:如高速電機(jī)、高速離心機(jī)等,滿足高轉(zhuǎn)速和低磨損的需求。嘉定區(qū)耐用磁浮備用軸承...
2025-11-29 -
普陀區(qū)整套磁浮備用軸承貨源充足
7.根據(jù)權(quán)利要求4所述的磁懸浮軸承控制裝置,其特征在于,所述減法器的同相端接入所述第二軸承線圈的電流;以及,所述減法器的反相端接入所述***軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比。8.根據(jù)權(quán)利要求1所述的磁懸浮軸承控制裝置,其特征在于,所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器。其無機(jī)械接觸、高轉(zhuǎn)速、低磨損等特點(diǎn)使其具有廣泛的應(yīng)用前景和技術(shù)優(yōu)勢。普陀區(qū)整套磁浮備用軸承貨源充足與傳統(tǒng)...
2025-11-28 -
金山區(qū)本地磁浮備用軸承貨源充足
磁懸浮軸承(Magnetic Bearing) 是利用磁力作用將轉(zhuǎn)子懸浮于空中,使轉(zhuǎn)子與定子之間沒有機(jī)械接觸。其原理是磁感應(yīng)線與磁浮線成垂直,軸芯與磁浮線是平行的,所以轉(zhuǎn)子的重量就固定在運(yùn)轉(zhuǎn)的軌道上,利用幾乎是無負(fù)載的軸芯往反磁浮線方向頂撐,形成整個轉(zhuǎn)子懸空,在固定運(yùn)轉(zhuǎn)軌道上。2024年12月16日,從哈電集團(tuán)獲悉,哈電集團(tuán)佳電股份先進(jìn)電機(jī)公司已自主掌握磁懸浮軸承及控制系統(tǒng)的設(shè)計、制造、調(diào)試等全部**技術(shù),生產(chǎn)出具有自主技術(shù)的磁懸浮軸承產(chǎn)品。與傳統(tǒng)的機(jī)械軸承不同,磁浮軸承利用磁力來支撐轉(zhuǎn)動部件,從而消除了摩擦和磨損,提高了設(shè)備的效率和壽命。金山區(qū)本地磁浮備用軸承貨源充足由上述內(nèi)容可知,該發(fā)明實(shí)...
2025-11-28 -
 楊浦區(qū)靠譜的磁浮備用軸承廠家現(xiàn)貨
楊浦區(qū)靠譜的磁浮備用軸承廠家現(xiàn)貨磁浮軸承傳感器,又叫磁懸浮軸承傳感器,是用于控制由永久磁鐵或者電磁鐵組成的軸承,配套組成數(shù)控磁軸承系統(tǒng)。磁浮軸承傳感器,又叫磁懸浮軸承傳感器 [1],是利用磁力作用將轉(zhuǎn)子懸浮于空中,使轉(zhuǎn)子與定子之間沒有機(jī)械接觸。磁浮軸承傳感器是磁軸承系統(tǒng)的重要組成部分,其直接關(guān)系到系統(tǒng)對轉(zhuǎn)子工作位置的控制。其原理是磁感應(yīng)線與磁浮線成垂直,軸芯與磁浮線是平行的,所以轉(zhuǎn)子的重量就固定在運(yùn)轉(zhuǎn)的軌道上,利用幾乎是無負(fù)載的軸芯往反磁浮線方向頂撐,形成整個轉(zhuǎn)子懸空,在固定運(yùn)轉(zhuǎn)軌道上。對于所有選裝機(jī)械而言,都需要監(jiān)測旋轉(zhuǎn)機(jī)械軸的轉(zhuǎn)速,這是衡量機(jī)器正常運(yùn)轉(zhuǎn)的一個重要指標(biāo)。而磁浮軸承測量轉(zhuǎn)速的優(yōu)越性在于它既能響應(yīng)零轉(zhuǎn)速,也能響...
2025-11-28 -
閔行區(qū)直銷磁浮備用軸承選擇
磁軸承要得到廣泛的應(yīng)用,模擬控制器的在線調(diào)節(jié)性能差不能不說是其原因之一,因此,數(shù)字化方向是磁軸承的發(fā)展趨勢。同時,要實(shí)現(xiàn)磁軸承系統(tǒng)的智能化,顯然模擬控制器是難以滿足這方面的要求。因此從提高磁軸承性能、可靠性、增強(qiáng)控制器的柔性和減小體積、功耗和今后往網(wǎng)絡(luò)化、智能化方向發(fā)展等角度,必須實(shí)現(xiàn)控制器數(shù)字化。近三十年來控制理論得到飛速發(fā)展并取得了廣泛應(yīng)用。我國對磁軸承的研究始于50年代末,后因各種原因進(jìn)展不快,近十年才引起科研單位的足夠重視。清華大學(xué)工程物理系的趙鴻賓教授從1988年致力于此項(xiàng)研究,趙教授介紹說,磁軸承屬機(jī)電一體化產(chǎn)品,是控制理論、電子電力、電磁學(xué)、轉(zhuǎn)子動力學(xué)及計算機(jī)科學(xué)等學(xué)科交叉的結(jié)晶...
2025-11-28 -
黃浦區(qū)耐用磁浮備用軸承選擇
圖1為2015年12月以前的一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖。圖2為該發(fā)明實(shí)施例提供的一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖;圖3為該發(fā)明實(shí)施例提供的另一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖。 [3]1.一種磁懸浮軸承控制裝置,包括:作用相反的***軸承線圈和第二軸承線圈;其中,所述***軸承線圈和第二軸承線圈之間設(shè)置有轉(zhuǎn)子,且所述***軸承線圈連接***功率放大器,所述第二軸承線圈連接第二功率放大器,其特征在于,所述控制裝置還包括:位移調(diào)節(jié)系統(tǒng)、差分系統(tǒng)和電流調(diào)節(jié)器;其中,所述位移調(diào)節(jié)系統(tǒng)采集所述轉(zhuǎn)子偏離預(yù)設(shè)位置的偏離位移,并將所述偏離位移轉(zhuǎn)換為偏移電流值,且同時所述差分系統(tǒng)對所述***軸承線圈的...
2025-11-28 -
崇明區(qū)質(zhì)量磁浮備用軸承選擇
由上述內(nèi)容可知,該發(fā)明實(shí)施例提供的技術(shù)方案,在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)***功率放大器和第二功率放大器的當(dāng)前占空比,使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,進(jìn)而調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。進(jìn)一步的,參考圖3所示,為該發(fā)明實(shí)施例提供的又一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖,其中,所述位移調(diào)節(jié)系統(tǒng)60包括:一位移傳感器62;以及,與所述位移傳感器62相連的位移調(diào)節(jié)器61;其中,所述位移傳感器62采集所述轉(zhuǎn)子30偏離預(yù)設(shè)位置的偏離位移,所述位移調(diào)節(jié)器61將所述偏離位移轉(zhuǎn)換為偏移電流值。高可靠性:在極端條件下仍能...
2025-11-27 -
 靜安區(qū)靠譜的磁浮備用軸承選擇
靜安區(qū)靠譜的磁浮備用軸承選擇電流調(diào)節(jié)器對偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并根據(jù)調(diào)節(jié)占空比分別對***功率放大器和第二功率放大器各自的當(dāng)前占空比進(jìn)行調(diào)節(jié),以控制***軸承線圈和第二軸承線圈調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置不僅結(jié)構(gòu)簡單,而且控制裝置的控制過程簡化了控制算法,提高了控制的實(shí)時性。 [1]2020年7月,《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》獲得第二十一屆中國**銀獎。 [2](概述圖為《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》摘要附圖對材料和技術(shù)要求較高,需要持續(xù)的技術(shù)創(chuàng)新和研發(fā)。靜安區(qū)靠譜的磁浮備用軸承選擇2.根據(jù)權(quán)利要求1所述的磁懸浮軸承控制裝置,其特征在于,所述位...
2025-11-27 -
嘉定區(qū)質(zhì)量磁浮備用軸承廠家直銷
基于此,《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》實(shí)施例提供了一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng),在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)功率放大器的占空比使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,以調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。為實(shí)現(xiàn)上述目的,該發(fā)明實(shí)施例提供的技術(shù)方案如下,具體結(jié)合圖2和圖3所示,對該發(fā)明實(shí)施例提供的技術(shù)方案進(jìn)行詳細(xì)的描述。無摩擦:減少了能量損耗和磨損。嘉定區(qū)質(zhì)量磁浮備用軸承廠家直銷磁浮備用軸承是一種用于支持和穩(wěn)定旋轉(zhuǎn)設(shè)備的軸承,主要應(yīng)用于磁懸浮技術(shù)中。與傳統(tǒng)的機(jī)械軸承不同,磁浮軸承利用磁力來支撐...
2025-11-27 -
虹口區(qū)質(zhì)量磁浮備用軸承廠家現(xiàn)貨
推薦的,所述減法器的同相端接入所述***軸承線圈的電流;以及,所述減法器的反相端接入所述第二軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比。推薦的,所述減法器的同相端接入所述第二軸承線圈的電流;以及,所述減法器的反相端接入所述***軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行...
2025-11-27 -
 徐匯區(qū)常見磁浮備用軸承設(shè)備廠家
徐匯區(qū)常見磁浮備用軸承設(shè)備廠家**目的《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》的目的是提供一種優(yōu)化的磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng),在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)功率放大器的占空比使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,以調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。 [3]技術(shù)方案《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》提供的技術(shù)方案如下:一種磁懸浮軸承控制裝置,包括:作用相反的***軸承線圈和第二軸承線圈;其中,所述***軸承線圈和第二軸承線圈之間設(shè)置有轉(zhuǎn)子,且所述***軸承線圈連接***功率放大器,所述第二軸承線圈連接第二功率放大器。隨著技...
2025-11-27 -
 上海耐用磁浮備用軸承價格查詢
上海耐用磁浮備用軸承價格查詢此外,該發(fā)明實(shí)施例對提供的減法器的同相端和反相端連接的軸承線圈電流不作限制,即,所述減法器的同相端接入所述第二軸承線圈的電流;以及,所述減法器的反相端接入所述***軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比。引入更先進(jìn)的控制算法和智能控制技術(shù);上海耐用磁浮備用軸承價格查詢由上述內(nèi)容可知,該發(fā)明實(shí)施例提供的技術(shù)方案,在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)***功率放大器和第二功率放大器...
2025-11-27 -
浦東新區(qū)本地磁浮備用軸承價格查詢
磁性軸承以它特有的優(yōu)點(diǎn),被***地應(yīng)用到各個領(lǐng)域,從航天、**等高科技領(lǐng)域逐漸普及到一般的工業(yè)、民用設(shè)施。隨著高速、超高速技術(shù)的發(fā)展,電子控制技術(shù)水平的不斷提高,機(jī)械加工技術(shù)的進(jìn)步、環(huán)保意識的加強(qiáng)、磁懸浮技術(shù)知識的普及、磁力軸承價格的降低以及對軸承的要求不斷提高,普通的接觸軸承在某些場合由于不能滿足實(shí)際需要而逐漸被磁性軸承取代。在具體的應(yīng)用場合,比如機(jī)床主軸、航空發(fā)動機(jī)、計算機(jī)硬盤、壓縮機(jī)離心機(jī),磁性軸承起著支撐的作用。在另一方面,由于磁性軸承具有剛度和阻尼可調(diào)的特性,它在轉(zhuǎn)子振動的主動控制方面的應(yīng)用,是當(dāng)前和今后磁性軸承技術(shù)研究的一個熱點(diǎn),它的基本思想都是通過主動控制給系統(tǒng)引入附加的剛度及阻...
2025-11-27 -
寶山區(qū)銷售磁浮備用軸承設(shè)備廠家
(3)剛度 、阻尼均可調(diào),從而使轉(zhuǎn)子很容易通過臨界轉(zhuǎn)速,實(shí)現(xiàn)超高速運(yùn)轉(zhuǎn);(4)全部回轉(zhuǎn)特性 (如速度 、載荷、軸線位置、失衡量 、千擾頻率等) 都可以通過傳感器和控制系統(tǒng)的信息獲取,因而可對機(jī)器的運(yùn)行狀態(tài)實(shí)行診斷和監(jiān)控,這對高性能機(jī)床的適應(yīng)控制特別有利;(5)可靠性高,一方面因無磨損,沒有潤滑和密封裝置。機(jī)械結(jié)構(gòu)得到簡化,從而保證了高可靠性;另一方面,回轉(zhuǎn)件無繞組,定子繞組則類似于電機(jī)定子繞組,控制裝置由可更換的印刷電路板制成,其設(shè)計,制作采用富余度技術(shù),可獲得幾乎無限的使用壽命,故可靠度極高。 [1]低磨損:長期使用下磨損極小,延長了設(shè)備的使用壽命。寶山區(qū)銷售磁浮備用軸承設(shè)備廠家磁浮備用軸承...
2025-11-27 -
松江區(qū)整套磁浮備用軸承怎么樣
磁懸浮式軸承是利用磁力作用將轉(zhuǎn)子懸浮于空中,使轉(zhuǎn)子與定子之間沒有機(jī)械接觸。其原理是磁感應(yīng)線與磁浮線成垂直,軸芯與磁浮線是平行的,所以轉(zhuǎn)子的重量就固定在運(yùn)轉(zhuǎn)的軌道上,利用幾乎是無負(fù)載的軸芯往反磁浮線方向頂撐,形成整個轉(zhuǎn)子懸空,在固定運(yùn)轉(zhuǎn)軌道上。 [1]與傳統(tǒng)的滾動軸承、滑動軸承以及油膜軸承相比,磁軸承不存在機(jī)械接觸,轉(zhuǎn)子可以運(yùn)行到很高的轉(zhuǎn)速,具有機(jī)械磨損小、能耗低、噪聲小、壽命長、無需潤滑、無油污染等優(yōu)點(diǎn),特別適用于高速、真空、超凈等特殊環(huán)境中。磁懸浮事實(shí)上只是一種輔助功能,并非是**的軸承形式,具體應(yīng)用還得配合其它的軸承形式高速旋轉(zhuǎn)機(jī)械:如高速電機(jī)、高速離心機(jī)等,滿足高轉(zhuǎn)速和低磨損的需求。松江...
2025-11-27 -
楊浦區(qū)本地磁浮備用軸承廠家現(xiàn)貨
該發(fā)明實(shí)施例可選的所述位移調(diào)節(jié)器為位移PID(Proportion Integration Differentiation,比例-積分-微分)調(diào)節(jié)器。以及,該發(fā)明實(shí)施例可選的所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器。此外,參考圖3所示,所述差分系統(tǒng)70包括:一減法器71,其中,所述減法器71的一輸入端接入所述***軸承線圈10的電流,所述減法器72的另一端接入所述第二軸承線圈20的電流。其中,所述差分系統(tǒng)包括:一***電流傳感器72和一第二電流傳感器73;其中,所述減法器71的一輸入端電連接***電流傳感器72,所述***電流傳感器72用于采集所述***軸承線圈10的電流;以及,所述減法器71的另一輸...
2025-11-26 -
楊浦區(qū)質(zhì)量磁浮備用軸承價格查詢
一、機(jī)床電主軸電主軸分為車削電主軸、銑床電主軸和磨削電主軸,另外還有組合機(jī)床使用的多功能電主軸等多種類型。磁懸浮支撐電主軸眾所周知,由于提高生產(chǎn)率和加工精度的市場需求,機(jī)床電主軸近年來向著高速、高精度方向迅速發(fā)展。實(shí)驗(yàn)說明,當(dāng)切削速度超過一個臨界值以后會出現(xiàn)切削力急速下降,散熱也更好的狀態(tài)。比如銑削鋁鎂合金,需要切削速度大于1000m /min,而且高速加工的工件不易發(fā)生力變形和熱變形,精度容易得到保證,甚至可以加工高硬度的工件材料。傳統(tǒng)的滾動軸承在高速旋轉(zhuǎn)時,由于滾子的離心力和陀螺力急劇增大,造成發(fā)熱嚴(yán)重和壽命縮短,而動靜壓軸承同樣存在液體摩擦損失、發(fā)熱和剛度問題。磁性軸承由于自身***的特...
2025-11-26 -
金山區(qū)靠譜的磁浮備用軸承設(shè)備廠家
該發(fā)明實(shí)施例可選的所述位移調(diào)節(jié)器為位移PID(Proportion Integration Differentiation,比例-積分-微分)調(diào)節(jié)器。以及,該發(fā)明實(shí)施例可選的所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器。此外,參考圖3所示,所述差分系統(tǒng)70包括:一減法器71,其中,所述減法器71的一輸入端接入所述***軸承線圈10的電流,所述減法器72的另一端接入所述第二軸承線圈20的電流。其中,所述差分系統(tǒng)包括:一***電流傳感器72和一第二電流傳感器73;其中,所述減法器71的一輸入端電連接***電流傳感器72,所述***電流傳感器72用于采集所述***軸承線圈10的電流;以及,所述減法器71的另一輸...
2025-11-26 -
普陀區(qū)銷售磁浮備用軸承廠家直銷
基于此,《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》實(shí)施例提供了一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng),在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)功率放大器的占空比使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,以調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。為實(shí)現(xiàn)上述目的,該發(fā)明實(shí)施例提供的技術(shù)方案如下,具體結(jié)合圖2和圖3所示,對該發(fā)明實(shí)施例提供的技術(shù)方案進(jìn)行詳細(xì)的描述。低磨損:長期使用下磨損極小,延長了設(shè)備的使用壽命。普陀區(qū)銷售磁浮備用軸承廠家直銷高速旋轉(zhuǎn)機(jī)械:如高速電機(jī)、高速離心機(jī)等,滿足高轉(zhuǎn)速和低磨損的需求。精密加工和測量:如超精密機(jī)床、...
2025-11-26 -
靜安區(qū)耐用磁浮備用軸承設(shè)備廠家
推薦的,所述減法器的同相端接入所述***軸承線圈的電流;以及,所述減法器的反相端接入所述第二軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比。推薦的,所述減法器的同相端接入所述第二軸承線圈的電流;以及,所述減法器的反相端接入所述***軸承線圈的電流;其中,所述電流調(diào)節(jié)器對所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行...
2025-11-26 -
徐匯區(qū)耐用磁浮備用軸承貨源充足
磁性軸承可應(yīng)用于各種機(jī)器,例如泵、渦 輪機(jī) 、電動機(jī)和壓縮機(jī)。 在諸多機(jī)器中,轉(zhuǎn)軸的支承是靠機(jī)械方法,即通過球軸承、圓柱軸承、 不完全潤滑軸承,或液體靜壓軸承來實(shí)現(xiàn)的。而用磁性軸承,旋轉(zhuǎn)的軸 即懸浮在磁場中,因磁場的迅速變化足使轉(zhuǎn)軸處于中心位置,甚至當(dāng)動載作用時,其位置依然不變。磁性軸承是一種利用磁鐵相同兩極相互排斥的原理而制造的非接觸高性能軸承。與傳統(tǒng)滾珠軸承、滑動軸承以及油膜軸承相比,磁軸承不存在機(jī)械接觸,轉(zhuǎn)子可以達(dá)到很高的運(yùn)轉(zhuǎn)速度,具有機(jī)械磨損小、能耗低、噪聲小、壽命長、無需潤滑、無油污染等優(yōu)點(diǎn),特別適用高速、真空、超凈等特殊環(huán)境。磁軸承利用磁鐵相同兩極相互排斥的原理,或利用電場力和磁場...
2025-11-25 -
寶山區(qū)靠譜的磁浮備用軸承價格查詢
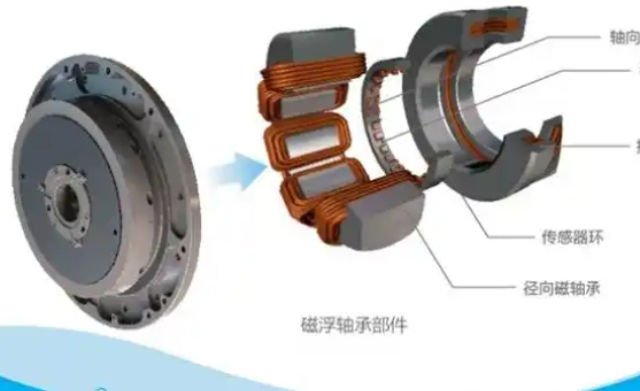
電場力與電場強(qiáng)度、電位移和電極面積成正比,磁場力與磁場強(qiáng)度、磁感應(yīng)強(qiáng)度和磁極面積成正比。適當(dāng)選擇電場或磁場參數(shù)和幾何尺寸,可得到一定的軸承承載能力和剛度。靜電吸力或磁引力與物體間距離的平方成反比,根據(jù)安爾休定理,這種靜力學(xué)系統(tǒng)是靜不定的,所以除采用抗磁體或超導(dǎo)體的軸承外,在靜電場或靜磁場下工作的軸承是不穩(wěn)定的。為使電磁軸承能穩(wěn)定工作,必須采用伺服裝置或調(diào)整電路參數(shù)等方法進(jìn)行控制。實(shí)際使用的電磁軸承一般由徑向軸承、推力軸承、伺服控制回路、阻尼器、速度傳感器或位置傳感器等組成。研發(fā)具有更高轉(zhuǎn)速、更大承載能力和更高剛度的磁懸浮軸承;寶山區(qū)靠譜的磁浮備用軸承價格查詢磁懸浮式軸承是利用磁力作用將轉(zhuǎn)子懸浮...
2025-11-25 -
崇明區(qū)銷售磁浮備用軸承貨源充足
磁浮軸承傳感器,又叫磁懸浮軸承傳感器,是用于控制由永久磁鐵或者電磁鐵組成的軸承,配套組成數(shù)控磁軸承系統(tǒng)。磁浮軸承傳感器,又叫磁懸浮軸承傳感器 [1],是利用磁力作用將轉(zhuǎn)子懸浮于空中,使轉(zhuǎn)子與定子之間沒有機(jī)械接觸。磁浮軸承傳感器是磁軸承系統(tǒng)的重要組成部分,其直接關(guān)系到系統(tǒng)對轉(zhuǎn)子工作位置的控制。其原理是磁感應(yīng)線與磁浮線成垂直,軸芯與磁浮線是平行的,所以轉(zhuǎn)子的重量就固定在運(yùn)轉(zhuǎn)的軌道上,利用幾乎是無負(fù)載的軸芯往反磁浮線方向頂撐,形成整個轉(zhuǎn)子懸空,在固定運(yùn)轉(zhuǎn)軌道上。對于所有選裝機(jī)械而言,都需要監(jiān)測旋轉(zhuǎn)機(jī)械軸的轉(zhuǎn)速,這是衡量機(jī)器正常運(yùn)轉(zhuǎn)的一個重要指標(biāo)。而磁浮軸承測量轉(zhuǎn)速的優(yōu)越性在于它既能響應(yīng)零轉(zhuǎn)速,也能響...
2025-11-24 -
閔行區(qū)定做磁浮備用軸承價格大全
**目的《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》的目的是提供一種優(yōu)化的磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng),在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)功率放大器的占空比使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,以調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。 [3]技術(shù)方案《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》提供的技術(shù)方案如下:一種磁懸浮軸承控制裝置,包括:作用相反的***軸承線圈和第二軸承線圈;其中,所述***軸承線圈和第二軸承線圈之間設(shè)置有轉(zhuǎn)子,且所述***軸承線圈連接***功率放大器,所述第二軸承線圈連接第二功率放大器。無機(jī)械...
2025-11-24 -
徐匯區(qū)銷售磁浮備用軸承廠家現(xiàn)貨
推薦的,所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器。相應(yīng)的,《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》還提供了一種磁懸浮軸承系統(tǒng),所述磁懸浮軸承系統(tǒng)包括上述的磁懸浮軸承控制裝置。 [3]改善效果相較于2015年12月以前的技術(shù),《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》提供的技術(shù)方案,在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)***功率放大器和第二功率放大器的當(dāng)前占空比,使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,進(jìn)而調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,使得控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。 [3當(dāng)轉(zhuǎn)子受到擾動偏離參考位置時,傳感器檢測出轉(zhuǎn)子的位移信號,并傳遞給控制器。徐匯區(qū)...
2025-11-24 -
普陀區(qū)購買磁浮備用軸承廠家直銷
磁懸浮軸承又稱磁力軸承,截至2015年12月是世界上公認(rèn)的高新技術(shù)之一,其技術(shù)涉及到機(jī)械學(xué)、電磁學(xué)、電子學(xué)、材料學(xué)、動力學(xué)、計算機(jī)科學(xué)等諸多學(xué)科。磁懸浮軸承利用電磁力將轉(zhuǎn)子懸浮,由于其具有無摩擦、壽命長、轉(zhuǎn)速高、精度高、噪聲小、無需潤滑等特點(diǎn),在很多應(yīng)用領(lǐng)域內(nèi)與傳統(tǒng)軸承相比存在明顯的優(yōu)越性,是21世紀(jì)具有發(fā)展前途的主導(dǎo)軸承之一。但是,2015年12月以前的磁懸浮軸承控制裝置結(jié)構(gòu)較為復(fù)雜,控制過程運(yùn)算量較大,進(jìn)而占用了較多的運(yùn)算時間。 [3]這種備用軸承通常設(shè)計為能夠快速響應(yīng)并提供足夠的支撐力,以防止設(shè)備損壞或停機(jī)。普陀區(qū)購買磁浮備用軸承廠家直銷該發(fā)明實(shí)施例可選的所述位移調(diào)節(jié)器為位移PID(Pr...
2025-11-24 -
青浦區(qū)質(zhì)量磁浮備用軸承怎么樣
《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》是珠海格力節(jié)能環(huán)保制冷技術(shù)研究中心有限公司于2015年12月11日申請的**,該專利的申請?zhí)枮椋既諡?016年2月17日,發(fā)明人是胡余生、郭偉林、賀永玲、胡叨福、李雪。該發(fā)明涉及磁懸浮技術(shù)領(lǐng)域。 [1] [3]《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》包括位移調(diào)節(jié)系統(tǒng)、差分系統(tǒng)和電流調(diào)節(jié)器;位移調(diào)節(jié)系統(tǒng)采集轉(zhuǎn)子偏離預(yù)設(shè)位置的偏離位移,將偏離位移轉(zhuǎn)換為偏移電流值,差分系統(tǒng)對***軸承線圈和第二軸承線圈的當(dāng)前電流值作差分處理后得到差分電流值;高轉(zhuǎn)速:磁軸承能夠支持更高的轉(zhuǎn)速,因?yàn)闆]有摩擦產(chǎn)生的熱量限制。青浦區(qū)質(zhì)量磁浮備用軸承怎么樣與傳統(tǒng)的滾動軸承、滑動...
2025-11-24 -
閔行區(qū)常見磁浮備用軸承廠家直銷
由上述內(nèi)容可知,該發(fā)明實(shí)施例提供的技術(shù)方案,在轉(zhuǎn)子偏離預(yù)設(shè)位置時,通過調(diào)節(jié)***功率放大器和第二功率放大器的當(dāng)前占空比,使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動電流,進(jìn)而調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,減小了運(yùn)算時間,進(jìn)而提高了控制的實(shí)時性。進(jìn)一步的,參考圖3所示,為該發(fā)明實(shí)施例提供的又一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖,其中,所述位移調(diào)節(jié)系統(tǒng)60包括:一位移傳感器62;以及,與所述位移傳感器62相連的位移調(diào)節(jié)器61;其中,所述位移傳感器62采集所述轉(zhuǎn)子30偏離預(yù)設(shè)位置的偏離位移,所述位移調(diào)節(jié)器61將所述偏離位移轉(zhuǎn)換為偏移電流值。其控制系統(tǒng)能夠?qū)崟r調(diào)節(jié)電流...
2025-11-23 -
上海靠譜的磁浮備用軸承價格查詢
電場力與電場強(qiáng)度、電位移和電極面積成正比,磁場力與磁場強(qiáng)度、磁感應(yīng)強(qiáng)度和磁極面積成正比。適當(dāng)選擇電場或磁場參數(shù)和幾何尺寸,可得到一定的軸承承載能力和剛度。靜電吸力或磁引力與物體間距離的平方成反比,根據(jù)安爾休定理,這種靜力學(xué)系統(tǒng)是靜不定的,所以除采用抗磁體或超導(dǎo)體的軸承外,在靜電場或靜磁場下工作的軸承是不穩(wěn)定的。為使電磁軸承能穩(wěn)定工作,必須采用伺服裝置或調(diào)整電路參數(shù)等方法進(jìn)行控制。實(shí)際使用的電磁軸承一般由徑向軸承、推力軸承、伺服控制回路、阻尼器、速度傳感器或位置傳感器等組成。隨著技術(shù)的進(jìn)步,磁浮軸承的應(yīng)用領(lǐng)域正在不斷擴(kuò)大。上海靠譜的磁浮備用軸承價格查詢此外,該發(fā)明實(shí)施例對提供的減法器的同相端和反...
2025-11-23 -
崇明區(qū)整套磁浮備用軸承設(shè)備廠家
一、機(jī)床電主軸電主軸分為車削電主軸、銑床電主軸和磨削電主軸,另外還有組合機(jī)床使用的多功能電主軸等多種類型。磁懸浮支撐電主軸眾所周知,由于提高生產(chǎn)率和加工精度的市場需求,機(jī)床電主軸近年來向著高速、高精度方向迅速發(fā)展。實(shí)驗(yàn)說明,當(dāng)切削速度超過一個臨界值以后會出現(xiàn)切削力急速下降,散熱也更好的狀態(tài)。比如銑削鋁鎂合金,需要切削速度大于1000m /min,而且高速加工的工件不易發(fā)生力變形和熱變形,精度容易得到保證,甚至可以加工高硬度的工件材料。傳統(tǒng)的滾動軸承在高速旋轉(zhuǎn)時,由于滾子的離心力和陀螺力急劇增大,造成發(fā)熱嚴(yán)重和壽命縮短,而動靜壓軸承同樣存在液體摩擦損失、發(fā)熱和剛度問題。磁性軸承由于自身***的特...
2025-11-23