-
YuanStem 20多能干細胞培養(yǎng)基使用說明書
-
YuanStem 20多能干細胞培養(yǎng)基
-
YuanStem 8多能干細胞培養(yǎng)基
-
當轉(zhuǎn)染變成科研的吞金獸,你還要忍多久?
-
ProFect-3K轉(zhuǎn)染挑戰(zhàn)賽—更接近Lipo3k的轉(zhuǎn)染試劑
-
自免/代謝/**/ADC——體內(nèi)中和&阻斷抗體
-
進口品質(zhì)國產(chǎn)價,科研試劑新**
-
腫瘤免疫研究中可重復(fù)數(shù)據(jù)的“降本增效”方案
-
Tonbo流式明星產(chǎn)品 流式抗體新選擇—高性價比的一站式服務(wù)
-
如何選擇合適的in vivo anti-PD-1抗體
黔西南北斗5G防碰撞預(yù)警廠家
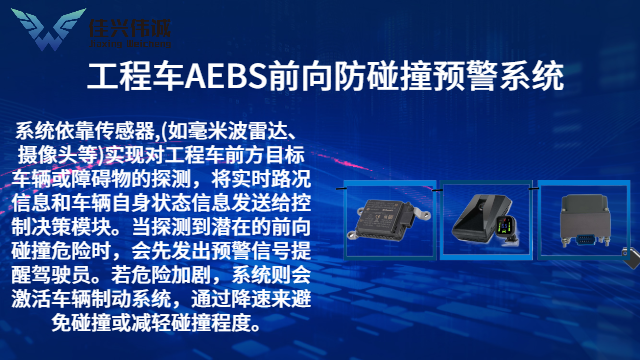
工程車在建筑施工、港口運輸?shù)葓鼍爸邪l(fā)揮著重要作用,但因其體型龐大、車身結(jié)構(gòu)復(fù)雜,存在大量視覺盲區(qū),極易引發(fā)事故。佳興偉誠工程車盲區(qū)防碰撞預(yù)警系統(tǒng),有效解決了這一難題。系統(tǒng)在工程車車身的車頭兩側(cè)、車身側(cè)面、車尾、后視鏡下方等關(guān)鍵位置,部署了高清攝像頭和毫米波雷達等傳感器,實現(xiàn) 360° 無死角的盲區(qū)監(jiān)測。搭載的 AI 算法能夠智能識別盲區(qū)內(nèi)的行人、非機動車和其他工程設(shè)備,并對其運動軌跡進行動態(tài)追蹤。一旦目標進入預(yù)警區(qū)域,系統(tǒng)立即通過視覺、聽覺、觸覺三重提醒方式,向駕駛員傳遞風(fēng)險信息,從根源上減少盲區(qū)導(dǎo)致的碾壓、碰撞事故,保障作業(yè)人員及周邊人群的生命安全。?工程車盲區(qū) BSD 防碰撞預(yù)警系統(tǒng)是保障工程作業(yè)安全的關(guān)鍵技術(shù)。黔西南北斗5G防碰撞預(yù)警廠家
佳興偉誠的礦用自卸車防碰撞預(yù)警系統(tǒng),是礦山運輸安全的堅實后盾。礦山環(huán)境惡劣,粉塵多、視線差,自卸車體型龐大,轉(zhuǎn)彎和倒車時極易引發(fā)碰撞。該系統(tǒng)搭載多組高抗干擾毫米波雷達,分別安裝在車頭、車身兩側(cè)及車尾,能精確探測 50 米范圍內(nèi)的其他礦車、巖壁、渣堆等目標。當兩車距離小于安全閾值時,駕駛室內(nèi)的顯示屏?xí)崟r顯示目標方位和距離,同時發(fā)出 “請注意前方車輛”“右側(cè)有障礙物” 等語音預(yù)警,聲光報警器也會相應(yīng)閃爍。即使在暴雨、濃霧等極端天氣下,系統(tǒng)仍能穩(wěn)定工作,通過算法過濾粉塵干擾,為礦用自卸車筑起一道全天候的安全防線,大幅降低礦山運輸事故率。黔西南北斗5G防碰撞預(yù)警廠家工程車防碰撞預(yù)警系統(tǒng)可根據(jù)不同車型和工作場景進行定制化設(shè)置,提供更貼合實際需求的服務(wù)。

在建筑工地、礦山廠區(qū)等復(fù)雜作業(yè)場景中,工程車的龐大身軀與作業(yè)環(huán)境的擁擠雜亂,讓視覺盲區(qū)成為安全事故的 “隱形”。駕駛員因視線受阻,難以及時察覺靠近的人員、設(shè)備或障礙物,極易引發(fā)碰撞事故。工程車盲區(qū)防碰撞預(yù)警系統(tǒng)的出現(xiàn),如同為車輛裝上 “智能眼” 與 “預(yù)警腦”,從被動規(guī)避轉(zhuǎn)向主動防御,為作業(yè)安全筑起堅實屏障。該系統(tǒng)的關(guān)鍵在于 “全域感知 + 智能預(yù)警”。通過在工程車車身四周(前保險杠、駕駛室頂部、左右后視鏡下方、車尾)安裝多顆高清夜視 AI 攝像頭,結(jié)合超廣角鏡頭與紅外補光技術(shù),可覆蓋車輛周邊 360 度無死角區(qū)域。攝像頭實時采集的畫面經(jīng)圖像處理單元處理后,通過畸變矯正、視角轉(zhuǎn)換與圖像拼接技術(shù),在駕駛室內(nèi)的顯示屏上生成全景鳥瞰圖,讓駕駛員直觀掌握車身周圍的人員、車輛及障礙物分布。
工程設(shè)備車工作時行駛速度慢、載重負荷大、剎車性能有其特點,按公路商用車的碰撞策略存在一定風(fēng)險,建議對佳興偉誠前方預(yù)警車輛(障礙物)采用固定距離方式,通過聲音和燈光向司機報警。?例如,空載汽車時速 30km/h 時,駕駛員反應(yīng)時間內(nèi)行駛距離為 6.25M;時速 80km/h 時,該距離為 16.67M。考慮路面摩擦系數(shù),如瀝青路面摩擦系數(shù) 0.5,時速 30km/h 時剎車距離 7.08M,時速 80km/h 時 50.4M。理想狀況下,建議前向碰撞距離預(yù)警在 60M。?佳興偉誠礦山工程機械車輛前向防碰撞預(yù)警系統(tǒng),在本車行駛速度超過設(shè)定速度時,會報警提醒駕駛員。其超速報警不依賴 GPS 定位測速,而是采集原車車速,能有效預(yù)防在隧道及無 GPS 信號地區(qū)使用,比如內(nèi)蒙古礦車項目中,車速超 30km/h 系統(tǒng)就會進行超速報警,且可根據(jù)車型設(shè)定超速預(yù)警提醒。深圳市佳興偉誠科技研發(fā)出工程機械盲區(qū)防碰撞預(yù)警系統(tǒng)。
我國煤礦業(yè)如今發(fā)展迅速,行業(yè)發(fā)展的同時帶來的問題也很多,如大多露天煤礦環(huán)境惡劣,風(fēng)沙大,可見度低,礦車在作業(yè)時看不到與前車的車距,很容易造成車輛追尾事故。佳興偉誠科技針對此現(xiàn)象研發(fā)出礦山車輛前向防碰撞預(yù)警系統(tǒng),該系統(tǒng)分別由:前向毫米波雷達傳感器;報警器;顯示器組成,通過安裝在車頭前方的前向毫米波雷達傳感器來識別前車與本車的距離,并在顯示器上顯示出與前車的距離,當距離過近時,報警器發(fā)出警報以此來提醒司機,避免造成危險事故發(fā)生。車輛防碰撞預(yù)警系統(tǒng)可智能分析工程車行駛軌跡,當與障礙物距離過近時,迅速發(fā)出聲光提醒,保障作業(yè)安全。黔西南北斗5G防碰撞預(yù)警廠家
依靠超聲波傳感器的工程車防碰撞預(yù)警系統(tǒng),可準確探測車輛盲區(qū),讓司機提前知曉潛在危險,規(guī)避碰撞。黔西南北斗5G防碰撞預(yù)警廠家
處理層的技術(shù)則賦予了系統(tǒng) “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環(huán)境圖像。目標檢測與追蹤算法則像是一位經(jīng)驗豐富的,通過對大量數(shù)據(jù)的深度學(xué)習(xí),能夠迅速識別出各種目標物體,并持續(xù)追蹤它們的運動軌跡。它能夠根據(jù)目標的運動狀態(tài),提前預(yù)判潛在的危險,為預(yù)警層提供可靠的決策依據(jù)。預(yù)警層是系統(tǒng)與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現(xiàn)全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音和光線的雙重刺激,及時提醒駕駛員注意危險。在一些特殊場景下,如工程車輛作業(yè)時,外部聲光報警裝置還能向周圍的人員發(fā)出警示,形成一個無死角的安全警示網(wǎng)絡(luò)。黔西南北斗5G防碰撞預(yù)警廠家
- 貴陽消防車北斗5G定位服務(wù)商 2025-12-10
- 內(nèi)蒙古山區(qū)工程車北斗5G定位終端 2025-12-10
- 北京工程車盲區(qū)防碰撞預(yù)警價格 2025-12-10
- 青島礦區(qū)北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預(yù)警多少錢 2025-12-09
- 日喀則礦區(qū)北斗5G定位專賣 2025-12-09
- 山南區(qū)車隊北斗5G定位哪家好 2025-12-09
- 呼倫貝爾消防車防碰撞預(yù)警方案 2025-12-09
- 臨夏工程車盲區(qū)防碰撞預(yù)警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 海南園區(qū)保安公司聯(lián)系方式 2025-12-10
- 河南雙目客流統(tǒng)計攝像機 2025-12-10
- 南京信息防爆風(fēng)機銷售電話 2025-12-10
- 景觀欄桿訊價 2025-12-10
- 鎮(zhèn)江附近哪里有防爆燈具情況 2025-12-10
- 機房機柜滅火一體機批發(fā)價 2025-12-10
- 探測器供應(yīng)商 2025-12-10
- 山東工業(yè)安全監(jiān)測系統(tǒng)煤炭自燃在線監(jiān)測 2025-12-10
- 上海迅軟科技圖紙加密軟件價格 2025-12-10
- 虹口區(qū)辦公用企業(yè)短消息銷售廠 2025-12-10