鄭州工程車輛行人防碰撞預警專賣
公交車輛作為城市公共交通的重要組成部分,每天運載大量乘客,其運行安全直接影響著公眾的出行安全。佳興偉誠公交車輛360°全景防碰撞預警系統,致力于為公交出行保駕護航。系統能夠實時監測公交車輛前方、側方以及后方的交通狀況,對前方車輛急剎、行人突然橫穿馬路、側方車輛強行并線等情況進行精確識別和預警。當預警發生時,系統通過車內語音提示、儀表盤警示燈等方式提醒駕駛員采取措施,同時還能將預警信息反饋到公交調度中心,便于調度人員及時掌握車輛運行情況,做出合理調度安排,無死角提升公交運營的安全性和可靠性,讓市民的公交出行更加安心。?深圳市佳興偉誠科技研發出工程機械盲區防碰撞預警系統。鄭州工程車輛行人防碰撞預警專賣

工程設備車工作時行駛速度慢、載重負荷大、剎車性能有其特點,按公路商用車的碰撞策略存在一定風險,建議對佳興偉誠前方預警車輛(障礙物)采用固定距離方式,通過聲音和燈光向司機報警。?例如,空載汽車時速 30km/h 時,駕駛員反應時間內行駛距離為 6.25M;時速 80km/h 時,該距離為 16.67M。考慮路面摩擦系數,如瀝青路面摩擦系數 0.5,時速 30km/h 時剎車距離 7.08M,時速 80km/h 時 50.4M。理想狀況下,建議前向碰撞距離預警在 60M。?佳興偉誠礦山工程機械車輛前向防碰撞預警系統,在本車行駛速度超過設定速度時,會報警提醒駕駛員。其超速報警不依賴 GPS 定位測速,而是采集原車車速,能有效預防在隧道及無 GPS 信號地區使用,比如內蒙古礦車項目中,車速超 30km/h 系統就會進行超速報警,且可根據車型設定超速預警提醒。銅川商用車盲區防碰撞預警電話工程車防碰撞預警系統通過實時顯示車輛與障礙物的距離,讓司機直觀了解當前安全狀況。
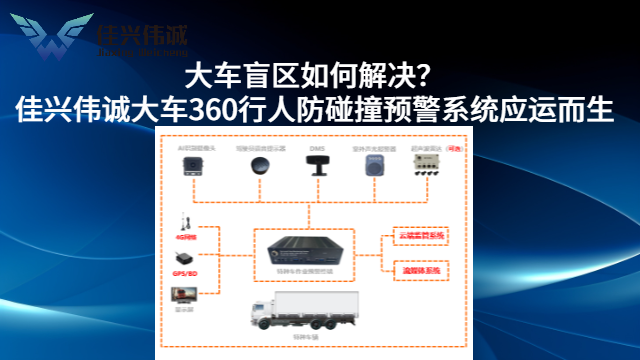
裝載機、鏟車、挖機等工程機械體型龐大,易產生視覺盲區。在光線差、噪聲大的惡劣環境中,后視鏡作用有限。尤其在水泥廠、混凝土公司,裝載機露天作業,廠區粉塵多、噪音大、人多車多、人車交互密集;礦山廠區環境更差,晝夜溫差大、礦塵多,視線受阻,加之其他工程機械多,裝載機盲區復雜,易發生碾壓事故,因此安裝車輛防碰撞預警系統很有必要。?隨著 AI 視覺技術發展,佳興偉誠科技將其融入 360 全景作業監控,實現 360 度工程車作業半徑內人員智能識別,可做到 6 路 AI 視覺盲區檢測。該系統搭配行人偵測攝像頭,運用 AI 算法實時智能偵測車身周邊及旋轉半徑內的作業人員,一旦偵測到,立即向司機發出警告,避免因視覺盲區引發意外,且無需額外攝像頭。?此系統終可實現車外聲光警報、車內蜂鳴器 + 語音播報功能,通過自有算法,結合全景 AI 影像(360)和盲區檢測(BSD),形成車輛 360 度無死角的作業半徑安全輔助系統,還支持四路 360 環視 + 額外兩路攝像頭接入,滿足多種車載監控需求。
北斗5G渣土車360°全景AI環視盲區防碰撞預警系統,給渣土車帶上“電子眼”,讓監管“看得見、管的住、可追溯”,減少生產安全事故發生,該產品為360°環視AI預警系統,可提供全天候無盲區的車周實時畫面顯示,結合物體識別算法,為用戶提供更安全的行車環境。產品通過四路高清攝像頭實時捕捉車周影像,對影像進行畸變矯正處理及畫面無縫拼接,形成一副完整的車輛周邊環境鳥瞰圖,并結合的3D 圖像引擎,減少用戶視角盲區。給渣土車帶上“緊箍咒”,”武裝到牙齒“不讓駕駛人員可以更好的消除盲區,還提醒靠近車輛、行人注意保持車距。同時智能的ADAS 物體識別算法,實時處理車道線及車周物體,為用戶提前判別周圍危險區域,減少刮傷、碰撞等交通事故,提高行駛安全。工程車防碰撞預警系統利用高精度傳感器,實時監測車輛周邊環境,準確識別潛在碰撞風險,為司機提前預警。

渣土車因體型高大、作業場景多為城市道路或工地,盲區范圍廣,且周邊行人、非機動車密集,極易因盲區隱患引發碰撞事故。為此,專門研發的渣土車盲區防碰撞預警系統,由分布在車身四周的毫米波雷達、高清攝像頭、超聲波傳感器及駕駛室內的智能顯示屏與聲光報警器構成,可精確監測車輛前后左右盲區中的行人、電動車、小型車輛及固定障礙物。系統具備動態監測與多級預警功能,能實時將盲區目標的位置、移動方向和距離等信息傳輸至顯示屏并可視化呈現;當目標處于較遠的預警區域時,觸發一級預警,顯示屏對應盲區位置亮起黃色指示燈,同時發出 “盲區有物體,請注意觀察” 的語音提示;若目標逼近至危險范圍,立即啟動二級預警,紅色指示燈高頻閃爍,語音變為 “盲區危險,立即停車”,并同步觸發駕駛室座椅震動和倒車雷達急促蜂鳴,多維度提醒駕駛員緊急避險,大幅減少渣土車盲區事故的發生。買車輛防碰撞預警就找佳興偉誠。喀什商用車盲區防碰撞預警專賣
依靠人工智能技術的工程車防碰撞預警系統,能不斷學習和適應新的駕駛場景,持續提升預警性能。鄭州工程車輛行人防碰撞預警專賣
處理層的技術則賦予了系統 “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環境圖像。目標檢測與追蹤算法則像是一位經驗豐富的,通過對大量數據的深度學習,能夠迅速識別出各種目標物體,并持續追蹤它們的運動軌跡。它能夠根據目標的運動狀態,提前預判潛在的危險,為預警層提供可靠的決策依據。預警層是系統與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音和光線的雙重刺激,及時提醒駕駛員注意危險。在一些特殊場景下,如工程車輛作業時,外部聲光報警裝置還能向周圍的人員發出警示,形成一個無死角的安全警示網絡。鄭州工程車輛行人防碰撞預警專賣
- 青島礦區北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預警多少錢 2025-12-09
- 日喀則礦區北斗5G定位專賣 2025-12-09
- 山南區車隊北斗5G定位哪家好 2025-12-09
- 呼倫貝爾消防車防碰撞預警方案 2025-12-09
- 臨夏工程車盲區防碰撞預警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 內蒙古工程車輛行人防碰撞預警方案 2025-12-09
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 寧夏工程車防碰撞預警多少錢 2025-12-08
- 煙臺合成抗溶泡沫滅火劑 2025-12-10
- 無錫附近哪里有防爆配電箱銷售電話 2025-12-10
- 松江區附近大模型智能客服銷售 2025-12-10
- 揚州道路防爆電器情況 2025-12-10
- 蘇州世澤無線圖數一體機生產廠家 2025-12-10
- 揚州防風安全眼鏡定制 2025-12-10
- 麗水輕型矯視安全眼鏡 2025-12-10
- 上海光纖測溫報警系統方案 2025-12-10
- 淮南系統外呼機器人價格查詢 2025-12-10
- 隔離欄桿推薦廠家 2025-12-10