錫林郭勒消防車360全景方案
露天礦大型自卸車在礦區主干道行駛時,車長超 10 米、車寬超 5 米,車身兩側及后方的盲區極易隱藏其他礦車或作業人員。佳興偉誠的礦車 360 全景盲區監測預警系統,在車頭保險杠、貨廂兩側及車尾安裝高清防爆攝像頭,配合間隔分布的超聲波雷達。當有小型礦用皮卡從側方盲區駛來,雷達先于攝像頭 0.3 秒探測到移動目標,系統立即在全景畫面中用橙色框標記,并發出一級預警聲;若作業人員靠近車身 3 米范圍,雷達穿透粉塵識別,攝像頭同步捕捉畫面,觸發二級警報,駕駛室內的警示燈對應方向閃爍,讓駕駛員在礦區復雜路況下提前避讓,大幅降低碰撞風險。佳興偉誠工程車 360 全景駕駛輔助系統持續迭代升級,為工程安全作業提供不斷完善的解決方案。錫林郭勒消防車360全景方案
工程機械是國民經濟發展的重要生產工具,在基礎設施建設中工程機械發揮著重 要作用,而在工程機械領域,挖掘機是其中重要的細分產品之一,挖掘機是一種 用于公路、鐵路、建筑、水電、港口、礦山等建設工程的土石方施工機械。 然而工程機械往往是體型過大,容易被遮擋視線。在作業環境中,很多地方是光線差、 噪聲大的惡劣環境作業,而車輛上配置的后視鏡卻很難起到應有的作用。而在建設工地、 石場,道路建設場所多為露天作業,往往是粉塵多、噪音大,工況環境復雜,作業工人多, 其他作業車也多,往往是人車交互密集,很容易發生碾壓等安全生產事故。 為貫徹落實安全作業管理目標,打造作業現場車輛全天候、安全監管模式,佳興偉 誠將AI視覺技術融入工程車視頻監控系統,研發應用工程車輛360度AI預警作業輔助系統,實 現工程作業車輛360度范圍內人員的智能識別,并且顯示人員與作業車輛的距離,當距離過近 時,系統自動語音播報及時提醒車輛作業人員注意安全,避免施工安全事故的發生。大同石油工程車360全景設計佳興偉誠推土機 360 全景盲區預警系統:重新定義作業安全。

佳興偉誠的車輛 360 全景盲區 AI 識別預警系統,是汽車安全領域的一項創新突破,實現了 360 全景技術與 AI 智能的深度融合。系統在傳統 360 全景系統的基礎上,創新性地植入了先進的深度學習算法,四個 1080P 高清攝像頭采集的畫面不能無縫拼接成完整的全景視圖,更能通過內置的高性能 AI 芯片實時分析畫面中的各類移動物體。無論是行人、自行車、摩托車還是其他車輛,AI 系統都能進行識別,識別率高達 98.5%。當系統檢測到盲區中有物體靠近時,會根據距離遠近進行分級預警:3 米外發出黃色提示,1.5 米內立即觸發紅色警報,同時伴隨方向盤震動與清晰的語音提示,如 “右側盲區有車輛靠近”。這種主動預警機制相比傳統全景系統更具前瞻性,能為駕駛員爭取 0.5-1 秒的寶貴反應時間,經第三方機構測試,可有效降低 80% 的盲區事故風險,為駕駛安全提供了有力保障
佳興偉誠360全景盲區監測系統專為挖掘機設計,有效解決傳統作業中的視野盲區問題。系統通過安裝在機身四周的4-6個高清攝像頭,實時捕捉挖掘機周圍環境影像。經過智能圖像處理技術,在駕駛室內顯示屏上呈現完整的360度俯視畫面。操作手可以清晰看到動臂后方、履帶兩側、配重尾部等傳統盲區的情況。特別是在狹窄工地作業時,系統能顯示挖掘機與周邊障礙物的距離,避免碰撞事故。當有人員或設備進入危險區域時,系統會自動發出聲光報警,提醒操作手注意。這套系統提升了挖掘機在復雜環境下的作業安全性,減少了90%以上的盲區事故。不管是狹窄街道會車,還是復雜路況行駛,車輛360 全景駕駛輔助系統都能助駕駛員避開盲區內潛在危險。
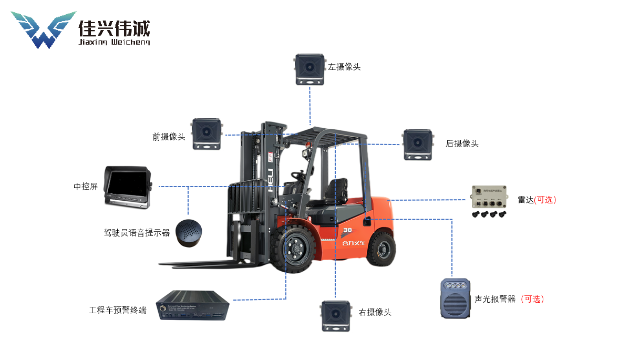
工程車 360 全景盲區監測預警系統并非簡單的攝像頭拼接,其背后蘊含著復雜的技術邏輯。系統通常由多個高清廣角攝像頭、圖像處理器、顯示屏以及預警模塊組成。攝像頭一般安裝在車頭、車尾、左右后視鏡等關鍵位置,確保無死角覆蓋車輛周圍環境。這些攝像頭需要具備高分辨率、高動態范圍的特性,以適應強光、逆光、夜間等不同光照條件,保證在各種天氣和時段都能捕捉到清晰的畫面。圖像處理器則是系統的 “大腦”,它能快速對多個攝像頭采集的畫面進行畸變校正、拼接融合,消除畫面之間的重疊和錯位,形成一幅無縫銜接的全景圖像。同時,處理器還會對圖像中的移動物體、障礙物進行智能識別,一旦發現有物體進入預設的危險區域,就會通過聲音報警、視覺提示等方式向駕駛員發出預警,為駕駛員爭取反應時間。工業級硬件和軟件打造,佳興偉誠工程車 360 全景系統無懼礦山等惡劣環境,穩定運行。錫林郭勒消防車360全景方案
選擇佳興偉誠工程車 360 全景駕駛輔助系統,就是選擇對工程安全的高度負責。錫林郭勒消防車360全景方案
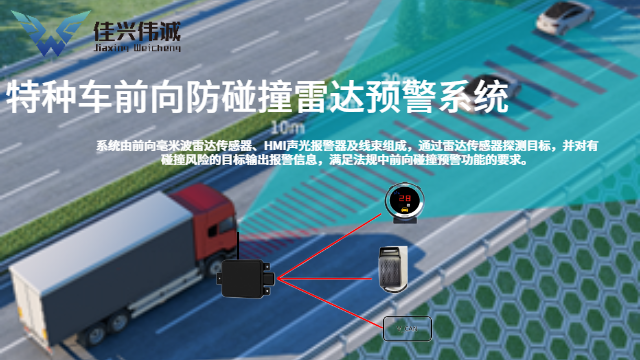
工程車360全景盲區監測預警系統的效能,源于其精密而強大的技術架構。其硬件基石是分布在車身關鍵位置(通常為車頭、車尾、左右后視鏡下方或車身兩側)的4至6顆高性能超廣角魚眼攝像頭,這些攝像頭經過特殊的光學設計和防護處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續提供穩定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實時接收所有攝像頭的視頻流,執行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復雜運算,在駕駛室內的高亮度、防眩光顯示屏上輸出無畸變、低延遲(通常≤50ms)的360度全景鳥瞰視圖。盲區監測預警功能則依賴于集成在車身周圍的毫米波雷達(中短距)和/或超聲波傳感器網絡。雷達波具有穿透雨霧、灰塵的能力,可精確探測移動或靜止障礙物的距離、方位和相對速度。系統通過多傳感器數據融合算法,將視覺信息與雷達探測信息進行時空校準和綜合分析,智能識別潛在威脅目標,濾除誤報(如飄動的篷布、地面雜物),并根據預設的風險評估模型(基于距離、接近速度、方向等)實時觸發的分級聲光報警,將無形風險轉化為操作員可直觀感知的預警信號。錫林郭勒消防車360全景方案
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 西安北斗5G防碰撞預警定制設計 2025-12-08
- 克拉瑪依汽車防撞防碰撞預警價格 2025-12-07
- 漢中工程車防碰撞預警定制 2025-12-07
- 銅川特種車盲區防碰撞預警哪家好 2025-12-07
- 天津大型車輛盲區防碰撞預警 2025-12-07
- 株洲主動安全防碰撞預警 2025-12-07
- 雙鴨山路橋工程車防碰撞預警哪家好 2025-12-07
- 昌吉工程車防碰撞預警哪家好 2025-12-06
- 包頭商用車前向防碰撞預警方案 2025-12-06
- 北京振動光纜生產商 2025-12-08
- 寧波電焊安全眼鏡定制 2025-12-08
- 上海ZK-D2180安檢門上門安裝 2025-12-08
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 浙江廚房滅火系統聯系方式 2025-12-08
- 消防mesh自組網應用 2025-12-08
- 西安moipia寞湃AI合頁開門機 2025-12-08
- 無錫用于防爆風機裝備 2025-12-08
- 烏魯木齊moipiaAI合頁開門機 2025-12-08
- 海口保安公司需要多少錢 2025-12-08