-
YuanStem 20多能干細(xì)胞培養(yǎng)基使用說(shuō)明書(shū)
-
YuanStem 20多能干細(xì)胞培養(yǎng)基
-
YuanStem 8多能干細(xì)胞培養(yǎng)基
-
當(dāng)轉(zhuǎn)染變成科研的吞金獸,你還要忍多久?
-
ProFect-3K轉(zhuǎn)染挑戰(zhàn)賽—更接近Lipo3k的轉(zhuǎn)染試劑
-
自免/代謝/**/ADC——體內(nèi)中和&阻斷抗體
-
進(jìn)口品質(zhì)國(guó)產(chǎn)價(jià),科研試劑新**
-
腫瘤免疫研究中可重復(fù)數(shù)據(jù)的“降本增效”方案
-
Tonbo流式明星產(chǎn)品 流式抗體新選擇—高性價(jià)比的一站式服務(wù)
-
如何選擇合適的in vivo anti-PD-1抗體
石家莊礦車(chē)盲區(qū)360全景定制
自卸車(chē)在礦區(qū)運(yùn)輸時(shí),車(chē)身長(zhǎng)且載貨后視野受限,轉(zhuǎn)彎和倒車(chē)易出事故。佳興偉誠(chéng)的 自卸車(chē)360 全景環(huán)視駕駛輔助系統(tǒng),通過(guò)車(chē)身四周的高清攝像頭,將實(shí)時(shí)畫(huà)面拼接成全景影像。駕駛員在駕駛室內(nèi)就能清晰看到車(chē)身周?chē)牡V道、其他車(chē)輛及人員。轉(zhuǎn)彎時(shí),系統(tǒng)自動(dòng)放大側(cè)方盲區(qū)畫(huà)面,駕駛?cè)藛T能夠通過(guò)屏幕一覽無(wú)余的看到側(cè)方盲區(qū);倒車(chē)時(shí),顯示車(chē)尾與障礙物的距離并動(dòng)態(tài)提示。該系統(tǒng)適應(yīng)礦區(qū)顛簸環(huán)境,攝像頭防粉塵、抗振動(dòng),讓自卸車(chē)在復(fù)雜路況下行駛更安全,減少碰撞事故。工程車(chē)360全景監(jiān)測(cè)系統(tǒng)為駕駛員打造出車(chē)輛周邊 360 度無(wú)死角的全景視野。石家莊礦車(chē)盲區(qū)360全景定制
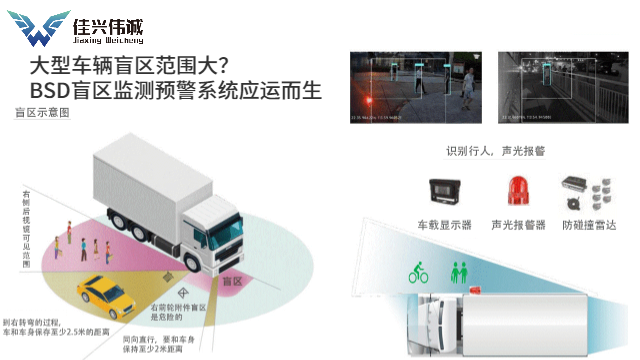
重型載貨卡車(chē)在城市物流配送時(shí),車(chē)長(zhǎng)超 12 米,轉(zhuǎn)彎時(shí)的內(nèi)輪差盲區(qū)易卷入行人和非機(jī)動(dòng)車(chē)。佳興偉誠(chéng)的卡車(chē) 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng),在車(chē)頭保險(xiǎn)杠、駕駛室兩側(cè)及車(chē)尾安裝高清攝像頭,配合沿車(chē)身分布的超聲波雷達(dá)。當(dāng)卡車(chē)右轉(zhuǎn)時(shí),雷達(dá)掃描右側(cè) 5 米內(nèi)的移動(dòng)目標(biāo),攝像頭實(shí)時(shí)拼接右側(cè)盲區(qū)畫(huà)面,若有騎行者進(jìn)入內(nèi)輪差范圍,系統(tǒng)立即用紅色框標(biāo)記并發(fā)出急促警報(bào),同時(shí)駕駛室內(nèi)對(duì)應(yīng)方向的震動(dòng)提示器啟動(dòng)。即使在雨天或夜間,攝像頭的夜視功能和雷達(dá)的穿透性仍能識(shí)別,讓駕駛員及時(shí)減速避讓?zhuān)蠓档统鞘信渌椭械霓D(zhuǎn)彎事故率。天津360全景定制設(shè)計(jì)佳興偉誠(chéng)360全景環(huán)視駕駛輔助系統(tǒng)選配超聲波雷達(dá),其預(yù)警信息與視頻畫(huà)面疊加,提升系統(tǒng)準(zhǔn)確性。

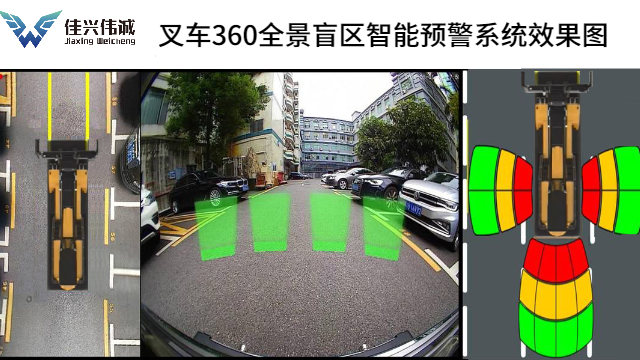
工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)的效能,源于其精密而強(qiáng)大的技術(shù)架構(gòu)。其硬件基石是分布在車(chē)身關(guān)鍵位置(通常為車(chē)頭、車(chē)尾、左右后視鏡下方或車(chē)身兩側(cè))的4至6顆高性能超廣角魚(yú)眼攝像頭,這些攝像頭經(jīng)過(guò)特殊的光學(xué)設(shè)計(jì)和防護(hù)處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續(xù)提供穩(wěn)定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實(shí)時(shí)接收所有攝像頭的視頻流,執(zhí)行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復(fù)雜運(yùn)算,在駕駛室內(nèi)的高亮度、防眩光顯示屏上輸出無(wú)畸變、低延遲(通常≤50ms)的360度全景鳥(niǎo)瞰視圖。盲區(qū)監(jiān)測(cè)預(yù)警功能則依賴于集成在車(chē)身周?chē)暮撩撞ɡ走_(dá)(中短距)和/或超聲波傳感器網(wǎng)絡(luò)。雷達(dá)波具有穿透雨霧、灰塵的能力,可精確探測(cè)移動(dòng)或靜止障礙物的距離、方位和相對(duì)速度。系統(tǒng)通過(guò)多傳感器數(shù)據(jù)融合算法,將視覺(jué)信息與雷達(dá)探測(cè)信息進(jìn)行時(shí)空校準(zhǔn)和綜合分析,智能識(shí)別潛在威脅目標(biāo),濾除誤報(bào)(如飄動(dòng)的篷布、地面雜物),并根據(jù)預(yù)設(shè)的風(fēng)險(xiǎn)評(píng)估模型(基于距離、接近速度、方向等)實(shí)時(shí)觸發(fā)的分級(jí)聲光報(bào)警,將無(wú)形風(fēng)險(xiǎn)轉(zhuǎn)化為操作員可直觀感知的預(yù)警信號(hào)。
工程車(chē) 360 全景環(huán)視盲區(qū)駕駛輔助系統(tǒng),是現(xiàn)代交通環(huán)境下保障工程車(chē)行車(chē)安全的重要科技裝備。其針對(duì)工程車(chē)體積大、駕駛位高、操作復(fù)雜及盲區(qū)多的特點(diǎn),通過(guò)高科技手段明顯提升了行車(chē)安全性。?該系統(tǒng)的在于借助車(chē)身前后左右的四枚超廣角攝像頭,實(shí)時(shí)采集周?chē)曨l數(shù)據(jù),經(jīng)主機(jī)處理和視頻拼接技術(shù),在駕駛室內(nèi)呈現(xiàn) 360 度無(wú)死角全景鳥(niǎo)瞰圖,讓駕駛員輕松掌握車(chē)輛周邊情況,消除盲區(qū)障礙。?除基礎(chǔ)環(huán)視功能外,系統(tǒng)集成了多重主動(dòng)安全功能。BSD 行人檢測(cè)智能預(yù)警功能,能識(shí)別靠近人員,通過(guò)車(chē)內(nèi)語(yǔ)音報(bào)警和車(chē)外大功率聲光報(bào)警的雙重機(jī)制,既提醒駕駛員,又警示過(guò)往人員遠(yuǎn)離,兼顧多方安全。?同時(shí),系統(tǒng)支持多路行車(chē)記錄,可記錄作業(yè)過(guò)程,為事故調(diào)查提供證據(jù),也為駕駛員行為提供反饋,管理人員還能實(shí)時(shí)查看并遠(yuǎn)程指導(dǎo)監(jiān)督,進(jìn)一步強(qiáng)化安全管理。佳興偉誠(chéng)工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)采用 “毫米波雷達(dá) + 視覺(jué)圖像” 融合技術(shù),提升識(shí)別準(zhǔn)確率。
由于運(yùn)輸車(chē)安全進(jìn)出工房裝卸產(chǎn)品的時(shí)經(jīng)常發(fā)生碰撞。運(yùn)輸車(chē)輛在進(jìn)出工房大門(mén)時(shí),車(chē)輛兩側(cè)存在視覺(jué)盲區(qū),以往依靠輔助人員提示進(jìn)行作業(yè),但因環(huán)境狹窄且環(huán)境噪音大,輔助人員視線容易受阻,導(dǎo)致司機(jī)難以完全掌握周?chē)鸂顟B(tài),存在碰撞風(fēng)險(xiǎn)。該系統(tǒng)主要用于保證車(chē)上產(chǎn)品的運(yùn)輸安全。特種車(chē)360駕駛輔助系統(tǒng)在車(chē)輛運(yùn)輸過(guò)程中與周?chē)h(huán)境小于安全距離時(shí)能夠自主預(yù)警(包括車(chē)輛頂部的安全距離預(yù)警),避免司機(jī)因環(huán)境狀態(tài)未知而出現(xiàn)的碰撞事故。系統(tǒng)通過(guò)安裝在車(chē)身周?chē)昂笞笥业?4 個(gè)超廣角、高清夜視攝像頭,實(shí)時(shí)采集車(chē)身四周的高清視頻畫(huà)面,在圖像處理器中經(jīng)過(guò)360算法畸變矯正、圖像拼接和融合等處理,終合成車(chē)身周?chē)?360°的鳥(niǎo)瞰全景畫(huà)面,并顯示在車(chē)載顯示屏上,為司機(jī)提供 360°全景駕駛輔助。目標(biāo)識(shí)別準(zhǔn)確率高,佳興偉誠(chéng)車(chē)輛 360 全景駕駛輔助系統(tǒng)極大減少誤報(bào),保障駕駛安全。天津360全景定制設(shè)計(jì)
車(chē)輛360全景環(huán)視駕駛輔助系統(tǒng),裝上后給你上帝般的視角。石家莊礦車(chē)盲區(qū)360全景定制
在商用車(chē)的日常運(yùn)營(yíng)中,盲區(qū)問(wèn)題一直是威脅行車(chē)安全的重大隱患。佳興偉誠(chéng)商用車(chē)盲區(qū) 360 全景無(wú)死角監(jiān)測(cè)系統(tǒng)應(yīng)運(yùn)而生,為這一難題提供了完美解決方案。?該系統(tǒng)主要由多個(gè)高清攝像頭、毫米波雷達(dá)、超聲波雷達(dá)、車(chē)載處理單元和顯示屏組成。在商用車(chē)的車(chē)頭、車(chē)尾、車(chē)身兩側(cè)等關(guān)鍵位置,分別安裝 210° 超廣角高清攝像頭,可對(duì)車(chē)輛周邊環(huán)境進(jìn)行實(shí)時(shí)拍攝。同時(shí),毫米波雷達(dá)與超聲波雷達(dá)能夠在復(fù)雜天氣及光線條件下,感知車(chē)輛周?chē)矬w的距離與移動(dòng)情況。?系統(tǒng)的功能十分強(qiáng)大。通過(guò)圖像拼接技術(shù),能將多個(gè)攝像頭采集到的畫(huà)面無(wú)縫拼接,為駕駛員呈現(xiàn)出 360° 全景鳥(niǎo)瞰圖,讓車(chē)輛周?chē)鸂顩r一目了然,徹底消除傳統(tǒng)后視鏡的盲區(qū)。其搭載的 AI 智能識(shí)別算法,可自動(dòng)檢測(cè)出 5 - 7 米范圍內(nèi)的行人、車(chē)輛、障礙物等移動(dòng)目標(biāo),并根據(jù)危險(xiǎn)程度分級(jí)觸發(fā)語(yǔ)音提示與 90 - 120dB 的聲光報(bào)警。例如,當(dāng)檢測(cè)到左側(cè)有行人靠近時(shí),系統(tǒng)會(huì)清晰播報(bào) “左側(cè)有人,請(qǐng)注意!”,同時(shí)車(chē)內(nèi)顯示屏上對(duì)應(yīng)的目標(biāo)位置會(huì)以紅框閃爍標(biāo)記。石家莊礦車(chē)盲區(qū)360全景定制
- 青島礦區(qū)北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預(yù)警多少錢(qián) 2025-12-09
- 日喀則礦區(qū)北斗5G定位專(zhuān)賣(mài) 2025-12-09
- 山南區(qū)車(chē)隊(duì)北斗5G定位哪家好 2025-12-09
- 呼倫貝爾消防車(chē)防碰撞預(yù)警方案 2025-12-09
- 臨夏工程車(chē)盲區(qū)防碰撞預(yù)警怎么樣 2025-12-09
- 濟(jì)南車(chē)隊(duì)北斗5G定位專(zhuān)賣(mài) 2025-12-09
- 內(nèi)蒙古工程車(chē)輛行人防碰撞預(yù)警方案 2025-12-09
- 咸陽(yáng)大型車(chē)輛盲區(qū)防碰撞預(yù)警設(shè)計(jì) 2025-12-08
- 寧夏工程車(chē)防碰撞預(yù)警多少錢(qián) 2025-12-08
- 煙臺(tái)合成抗溶泡沫滅火劑 2025-12-10
- 無(wú)錫附近哪里有防爆配電箱銷(xiāo)售電話 2025-12-10
- 松江區(qū)附近大模型智能客服銷(xiāo)售 2025-12-10
- 揚(yáng)州道路防爆電器情況 2025-12-10
- 蘇州世澤無(wú)線圖數(shù)一體機(jī)生產(chǎn)廠家 2025-12-10
- 揚(yáng)州防風(fēng)安全眼鏡定制 2025-12-10
- 麗水輕型矯視安全眼鏡 2025-12-10
- 上海光纖測(cè)溫報(bào)警系統(tǒng)方案 2025-12-10
- 淮南系統(tǒng)外呼機(jī)器人價(jià)格查詢 2025-12-10
- 隔離欄桿推薦廠家 2025-12-10