晉中北斗5G360全景
在重型工程機械主宰的復雜作業現場,巨大的車身結構天然形成了無數視覺死角,這些“盲區”如同潛伏的危機,時刻威脅著設備操作員、現場工作人員及周邊環境的安全。工程車360全景全景盲區監測預警系統應運而生,它并非簡單的影像拼接,而是一套融合感知技術與智能算法的主動安全解決方案。該系統通過環繞車身部署的高分辨率超廣角魚眼攝像頭,結合先進的圖像拼接、畸變校正與實時渲染算法,在駕駛室內的顯示屏上無縫呈現車輛周圍360度的“上帝視角”,徹底消除傳統后視鏡和駕駛員肉眼無法覆蓋的視覺盲區。其關鍵價值在于將“被動觀察”升級為“主動預警”,通過毫米波雷達或超聲波傳感器探測進入危險區域的動態與靜態障礙物,并依據碰撞風險等級即時觸發分級的聲光警報(如蜂鳴、語音提示、屏幕閃爍、區域高亮),為操作員提供寶貴的決策與反應時間。這不是技術上的突破,更是工程機械安全文化的一次深刻變革,明顯提升了作業現場的本質安全水平。360 全景盲區駕駛輔助系統,在發現盲區內危險時,自動閃爍聲光警報器。晉中北斗5G360全景
在繁忙嘈雜的料場、攪拌站或港口碼頭,裝載機需要頻繁穿梭、轉向、舉升、裝卸物料,駕駛員視野受限是影響效率與安全的主要瓶頸。佳興偉誠工程車輛360全景駕駛輔助系統,為裝載機駕駛員裝上“清晰之眼”。系統攝像頭科學布置于駕駛室頂部、引擎罩兩側、后機罩及大臂根部,消除車頭巨大鏟斗及舉升動臂造成的龐大盲區。佳興偉誠先進的圖像拼接算法,在駕駛員前方屏幕實時呈現無縫連接的360度鳥瞰視圖,清晰顯示輪胎與料堆邊緣的距離、后方接近的車輛或人員、側方狹窄通道的通行空間以及舉升時鏟斗與上方障礙物(如料倉、車輛)的間隙。在堆料、取料、裝車等高頻操作中,駕駛員無需完全依賴經驗判斷,借助全景視圖即可控制車輛走位,一次到位完成裝卸,大幅減少進退調整次數,提升作業流暢度。在倒車駛離料堆或穿越復雜路口時,全景視野有效預防碰撞事故。佳興偉誠系統提升了裝載機在有限空間內的機動靈活性與全天候作業安全性。晉中北斗5G360全景佳興偉誠特種車360全景盲區監測系統中的 如同工程車的 “智慧之眼”,準確采集車輛周圍環境數據。

長途客運卡車在山區公路行駛時,連續彎道和坡道使駕駛員視線受阻,盲區易與對向車輛發生碰撞。佳興偉誠為其設計的系統,在卡車車頭和兩側安裝攝像頭,搭配廣角超聲波雷達。行駛至急彎時,雷達探測彎道另一側 5 米內的車輛,攝像頭的夜視補光功能在隧道和夜間清晰顯示路況,若有對向車輛占道,系統立即報警并提示減速。停靠服務區時,雷達掃描車身周圍是否有乘客靠近,攝像頭輔助駕駛員安全停車,讓長途客運在復雜路況下也能保障乘客安全
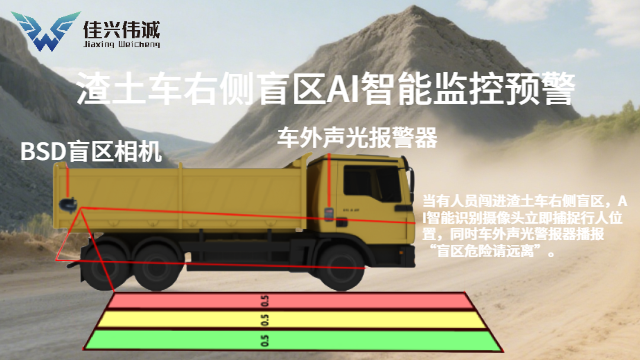
重型載貨卡車在城市物流配送時,車長超 12 米,轉彎時的內輪差盲區易卷入行人和非機動車。佳興偉誠的卡車 360 全景盲區監測預警系統,在車頭保險杠、駕駛室兩側及車尾安裝高清攝像頭,配合沿車身分布的超聲波雷達。當卡車右轉時,雷達掃描右側 5 米內的移動目標,攝像頭實時拼接右側盲區畫面,若有騎行者進入內輪差范圍,系統立即用紅色框標記并發出急促警報,同時駕駛室內對應方向的震動提示器啟動。即使在雨天或夜間,攝像頭的夜視功能和雷達的穿透性仍能識別,讓駕駛員及時減速避讓,大幅降低城市配送中的轉彎事故率。佳興偉誠 360 全景駕駛輔助系統降低因視野盲區導致的事故風險,守護工程作業安全。
混凝土泵車作業時,巨大的臂架展開猶如擎天之柱,其下方及周邊區域存在嚴重的視覺盲區,對現場人員安全構成巨大威脅。佳興偉誠工程車輛360全景駕駛輔助系統,專為解決泵車這一痛點而生。系統攝像頭不覆蓋車體底盤四周(重點監控支腿區域、車頭車尾),更創新性在關鍵臂架節點(如轉塔、1號臂根部)部署,通過佳興偉誠特有的多視角融合技術,將車身周圍地面狀況與臂架下方實時畫面整合呈現于駕駛室屏幕。操作手在操作遙控器或駕駛室內,即可清晰掌握支腿下方是否堅實平整、有無人員設備滯留、鋼筋網是否妨礙布管、臂架與臨近建筑物或高壓線的安全距離。系統可設置動態安全警戒區域,當人員或設備進入臂架下方高危區域時自動觸發聲光報警,為“臂下禁區”提供智能化硬隔離。在狹窄工地布管時,全景視野結合車身輪廓線,極大輔助駕駛員精確操控車輛位置,避免刮蹭。佳興偉誠系統是保障泵送作業安全、杜絕盲區事故的智能守護神。大尺寸高清顯示屏,操作簡單直觀,佳興偉誠特種車 360 全景系統方便駕駛員使用。唐山工程車360全景
商用車360全景預警系統支持自定義畫面顯示區域,駕駛員可根據自身需求重點關注特定盲區。晉中北斗5G360全景
環衛清潔車在城市環境維護中扮演著至關重要的角色,它們不辭辛勞地清掃街道、收集垃圾,為城市的整潔美麗付出努力。然而,由于環衛清潔車車身較大,存在眾多盲區,在作業和行駛過程中極易引發安全事故,對環衛工人、其他道路使用者的生命安全構成威脅。為了有效解決這一問題,360 全景盲區預警系統應運而生,成為提升環衛清潔車安全性的關鍵技術。 360 全景盲區預警系統主要基于多個攝像頭和先進的圖像算法。在環衛清潔車的車身四周,包括車頭、車尾、兩側后視鏡下方等位置,安裝多個高清攝像頭。這些攝像頭實時采集車輛周圍的圖像信息,并將其傳輸至中心處理器。中心處理器通過圖像拼接算法,將各個攝像頭的畫面整合為一個完整的 360 度全景圖像,呈現在駕駛室內的顯示屏上。同時,系統利用圖像識別技術,對車輛周圍的物體進行檢測和分析。當檢測到有行人、車輛或其他障礙物進入盲區時,系統會根據距離和危險程度,及時發出不同級別的預警信號,如聲音警報、屏幕閃爍提示等,提醒駕駛員注意潛在的危險。晉中北斗5G360全景
- 青島礦區北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預警多少錢 2025-12-09
- 日喀則礦區北斗5G定位專賣 2025-12-09
- 呼倫貝爾消防車防碰撞預警方案 2025-12-09
- 臨夏工程車盲區防碰撞預警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 寧夏工程車防碰撞預警多少錢 2025-12-08
- 伊春消防車防碰撞預警設計 2025-12-08
- 黔西南北斗5G防碰撞預警廠家 2025-12-08
- 河北無感識別接送系統定制 2025-12-09
- 四川智能輔助駕駛價格多少 2025-12-09
- 廣東集中管控縱向加密有什么優勢 2025-12-09
- 香港性能強盾甲新材涂裝工藝 2025-12-09
- 靜安區本地云客服銷售電話 2025-12-09
- 包河區本地短信服務單價 2025-12-09
- 四川刷卡接送系統價格 2025-12-09
- 巢湖附近外呼機器人圖片 2025-12-09
- 山東無軌設備智能輔助駕駛商家 2025-12-09
- 浙江礦山機械智能輔助駕駛軟件 2025-12-09