興安盟商用車盲區360全景
在工程建設領域,工程車的安全運營始終是重中之重,而盲區則是導致事故的 關鍵因素。工程車 360 全景盲區監測預警系統的出現,正是為了解決這一難題。對于體型龐大的工程車而言,駕駛員的視野存在諸多局限,車頭下方、車身側面、車尾等位置的盲區極易隱藏行人、小型車輛或障礙物,稍有不慎就可能引發碰撞事故。尤其是在建筑工地、礦山、港口等復雜作業環境中,人員與車輛混合作業頻繁,盲區風險更是被放大。這套系統通過分布在車輛四周的高清攝像頭,實時采集各個方位的畫面,經過算法處理后形成一幅完整的 360 度全景影像,直觀地呈現在駕駛室內的顯示屏上,讓駕駛員能夠清晰掌握車輛周圍 360 度的實時狀況,就像擁有了 “上帝視角”,從根源上減少因視線盲區導致的安全隱患。從隱患到防控,佳興偉誠360°全景環視駕駛輔助系統守護露天礦車安全。興安盟商用車盲區360全景
對于大型車輛而言,佳興偉誠的大型車輛 360 全景系統更是不可或缺,尤其針對貨車、客車、工程車等車身龐大的車型,開發了對其車輛的適配版本。大型車輛因車身長度超過 6 米,傳統后視鏡存在的視覺盲區范圍可達 20-30 平方米,駕駛員在駕駛過程中難以掌握車輛周圍情況。佳興偉誠為大型車輛定制的 360 全景系統,采用了更大廣角的攝像頭(可視角度達 190 度),并增加了攝像頭數量,部分車型甚至配備 6-8 個攝像頭,確保覆蓋車輛全長及兩側 3 米范圍。系統在處理算法上進行了優化,針對大型車輛的轉彎半徑、內輪差等特點,開發了軌跡預測模型,在轉彎時能動態顯示車輛內輪差區域,并發出聲光預警。無論是轉彎、倒車還是行駛,駕駛員都能通過 12.3 英寸的大屏幕,清晰看到車輛四周全景,提前知曉潛在危險,及時調整行駛方向。經實際應用測試,安裝該系統的大型車輛,交通事故發生率降低了 65%,尤其是因視覺盲區導致的事故減少了 90%,更好的提升大型車輛的駕駛安全性與操控性。天津機場工程車360全景電話工程車360 全景駕駛輔助系統的操作極為簡便,駕駛員能快速上手,無需復雜學習。

佳興偉誠深耕車載安全領域多年,其工程車360全景盲區監測預警系統以“無死角監控+AI智能預警”為關鍵,通過車身四周部署的4路210°超廣角高清攝像頭,實時采集車輛周圍環境圖像。系統采用自主研發的圖像畸變矯正算法與深度學習技術,將多路影像無縫拼接成360°全景鳥瞰圖,消除傳統后視鏡盲區。在復雜施工場景中,駕駛員可直觀觀察車身四周5米范圍內的行人、車輛及障礙物,配合毫米波雷達的遠距離探測能力,實現“視覺+雷達”雙模態感知。該系統已成功應用于泥頭車、攪拌車、推土機等20余類工程車輛,在前海建設工地實測中,盲區事故率下降82%,成為行業安全標準升級的標準案例。
在挖掘機復雜多變的作業場景中,龐大的動臂、旋轉的上車體、以及狹窄的作業空間共同構筑了難以逾越的視野盲區“雷區”。佳興偉誠挖掘機360全景盲區監測駕駛輔助系統,正是為解決這一行業痛點而生。系統采用高防護魚眼攝像頭,精密部署于動臂根部、駕駛室頂部、配重尾部及底盤兩側。佳興偉誠獨有的高速圖像處理芯片,瞬間完成畸變校正與六路視頻無縫拼接,生成實時俯視全景圖,將曾經“看不見”的區域徹底暴露于操作手眼前。在管溝挖掘中,系統動態顯示鏟斗與溝壁的精確距離及預估落點;在建筑物拆除時,全景視圖清晰呈現回轉半徑內鋼筋、管線的位置,避免勾掛;在物料裝卸時,后方自卸車的相對位置與高度一目了然。尤為關鍵的是,系統關鍵在于主動盲區監測:當人員、設備或障礙物進入預設高風險區域(如旋轉半徑內、配重后方),系統立即觸發分級聲光報警(,并自動在屏幕上框出來提示危險源位置。佳興偉誠系統具備優越的環境適應性,強光抑制技術保障烈日下畫面清晰,微光全彩技術確保夜間或地下車庫作業如同白晝。實測數據表明,該系統可減少挖掘機盲區相關事故85%以上,大幅提升一次操作度30%,是現代化智能施工的安全基石與效率引擎。特種車360全景駕駛輔助系統可根據不同車型定制化安裝,無需大規模改造車輛,適配性強。

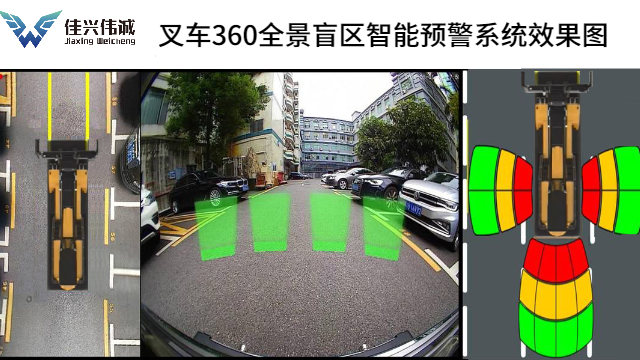
對于工程車駕駛員而言,車頭盲區是容易被忽視卻又極具危險性的區域。尤其是大型渣土車、混凝土攪拌車,車頭高度較高,駕駛員坐在駕駛座上很難看清車頭下方及前方 1-2 米范圍內的情況,兒童、小型工具等往往會被完全遮擋。360 全景盲區監測預警系統通過安裝在車頭格柵或保險杠位置的攝像頭,將車頭下方及前方的實時畫面傳輸到顯示屏上,駕駛員在起步、低速行駛或通過人群密集區域時,只需 看一眼顯示屏,就能清楚了解車頭周圍是否有障礙物或人員。系統還會根據車輛的行駛速度和與障礙物的距離,自動調整預警靈敏度,當車輛低速靠近障礙物時,預警會更加及時和頻繁,有效避免 “鬼探頭” 等突發情況造成的事故。360全景盲區監測系統中駕駛員語音提示器準確播報闖入人員方位,讓駕駛員及時掌握危險位置。烏海汽車防撞360全景找哪家
當盲區內有物體快速靠近,360 全景盲區駕駛輔助系統會以聲音和圖像雙重方式提醒駕駛員。興安盟商用車盲區360全景
工程車360全景盲區監測預警系統的效能,源于其精密而強大的技術架構。其硬件基石是分布在車身關鍵位置(通常為車頭、車尾、左右后視鏡下方或車身兩側)的4至6顆高性能超廣角魚眼攝像頭,這些攝像頭經過特殊的光學設計和防護處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續提供穩定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實時接收所有攝像頭的視頻流,執行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復雜運算,在駕駛室內的高亮度、防眩光顯示屏上輸出無畸變、低延遲(通常≤50ms)的360度全景鳥瞰視圖。盲區監測預警功能則依賴于集成在車身周圍的毫米波雷達(中短距)和/或超聲波傳感器網絡。雷達波具有穿透雨霧、灰塵的能力,可精確探測移動或靜止障礙物的距離、方位和相對速度。系統通過多傳感器數據融合算法,將視覺信息與雷達探測信息進行時空校準和綜合分析,智能識別潛在威脅目標,濾除誤報(如飄動的篷布、地面雜物),并根據預設的風險評估模型(基于距離、接近速度、方向等)實時觸發的分級聲光報警,將無形風險轉化為操作員可直觀感知的預警信號。興安盟商用車盲區360全景
- 青島礦區北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預警多少錢 2025-12-09
- 日喀則礦區北斗5G定位專賣 2025-12-09
- 山南區車隊北斗5G定位哪家好 2025-12-09
- 呼倫貝爾消防車防碰撞預警方案 2025-12-09
- 臨夏工程車盲區防碰撞預警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 內蒙古工程車輛行人防碰撞預警方案 2025-12-09
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 寧夏工程車防碰撞預警多少錢 2025-12-08
- 上海光纖測溫報警系統方案 2025-12-10
- 長寧區安裝大模型智能客服廠家直銷 2025-12-10
- 南京物料防爆電器包括什么 2025-12-10
- 南通信息防爆電器有哪些 2025-12-10
- 杭州智能輔助駕駛廠商 2025-12-10
- 廣州世澤無線圖數一體機優點 2025-12-10
- 國產RFID門禁卡復制 2025-12-10
- 江蘇2mm間距光幕傳感器推薦廠家 2025-12-10
- 紹興哪些道路護欄現貨 2025-12-10
- 徐匯區提供云客服銷售 2025-12-09