邢臺工程車360全景設計
佳興偉誠深耕車載安全領域多年,其工程車360全景盲區監測預警系統以“無死角監控+AI智能預警”為關鍵,通過車身四周部署的4路210°超廣角高清攝像頭,實時采集車輛周圍環境圖像。系統采用自主研發的圖像畸變矯正算法與深度學習技術,將多路影像無縫拼接成360°全景鳥瞰圖,消除傳統后視鏡盲區。在復雜施工場景中,駕駛員可直觀觀察車身四周5米范圍內的行人、車輛及障礙物,配合毫米波雷達的遠距離探測能力,實現“視覺+雷達”雙模態感知。該系統已成功應用于泥頭車、攪拌車、推土機等20余類工程車輛,在前海建設工地實測中,盲區事故率下降82%,成為行業安全標準升級的標準案例。商用車360全景預警系統支持自定義畫面顯示區域,駕駛員可根據自身需求重點關注特定盲區。邢臺工程車360全景設計
叉裝車(Telehandler)以其舉升高度和靈活性應用于物流、建筑、農業,但其舉升后的視野盲區及穩定性風險尤為突出。佳興偉誠360全景駕駛輔助系統,為這類多功能設備提供前所未有的“立體安全視野”。系統攝像頭不覆蓋車身底盤四周(監控行駛路徑障礙),更關鍵是在伸縮臂關鍵節點(如駕駛室上方、臂架中段)設置,通過佳興偉誠創新的多源視圖融合技術,在駕駛室屏幕同時呈現360度地面全景視圖和關鍵的高空臂架工作區域視圖(如貨叉載物狀態、與上方障礙物間隙)。操作手在舉升、伸縮、搬運物料時,能同時清晰掌握地面人員設備位置、高空障礙物(管線、屋檐)、貨叉與目標點的距離以及車身支腿狀態(防傾翻)。系統可設置工作區域安全預警,當人員進入危險區域自動提醒。在倉庫巷道穿行、崎嶇工地搬運、高空設備安裝等場景下,佳興偉誠系統是預防碰撞、碾壓、傾翻、高空墜物事故的安全裝置,提升復雜作業環境下的操作信心與效率。石家莊北斗5G360全景多少錢佳興偉誠工程車360全景盲區監測預警系統采用 “毫米波雷達 + 視覺圖像” 融合技術,提升識別準確率。

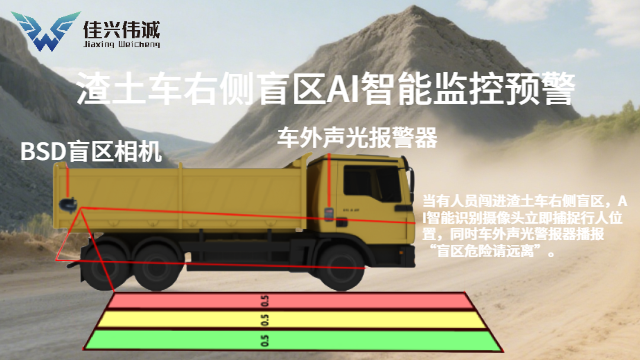
地下礦用鏟運機在狹窄巷道作業時,巷道寬度能容納車身,兩側巖壁與鏟運機的間隙形成致命盲區,易碰撞巷道支護或行走的礦工。佳興偉誠為其設計的系統,將 360 全景攝像頭與超聲波雷達集成在鏟運機車身四周。鏟運機轉彎時,雷達掃描 5 米內的巷道壁和人員,攝像頭實時拼接巷道全景,若與巖壁距離小于 0.5 米,系統發出急促警報,同時在畫面中用紅色線條標注危險邊界;當礦工在盲區行走,雷達通過人體反射波鎖定,攝像頭的紅外功能在無照明巷道內清晰顯示人員輪廓,雙重提示駕駛員減速,避免巷道內的碰撞事故。
工程車360全景盲區監測預警系統以多傳感器融合技術為關鍵,通過4-6個超廣角高清攝像頭(視角達210°)覆蓋車輛前后左右盲區,結合毫米波雷達或超聲波雷達實現環境感知冗余。攝像頭通常部署于后視鏡下側、保險杠上方及車身側面,支持IP6K9K級防水防塵,適應工地揚塵、暴雨等惡劣環境。系統搭載的AI視覺處理單元采用低延遲算法(響應時間<200ms),可實時拼接多路影像生成360°全景鳥瞰圖,并通過深度學習模型識別行人、車輛及障礙物。以佳興偉誠科技研發的方案為例,其系統通過4路BSD(盲點監測)攝像頭與AI算法結合,能檢測5-7米范圍內移動目標,并在車載顯示屏上以紅框標注危險區域,同時觸發分級聲光報警(車內90-120dB蜂鳴器+車外紅藍爆閃燈)。部分型號還集成駕駛員疲勞監測模塊,通過DMS攝像頭分析眼部動作,當檢測到閉眼或低頭超3秒時,立即發出語音警示,形成“人-車-環境”三位一體防護體系。佳興偉誠 360 全景系統的連接線束采用耐高低溫材料,在極端溫度環境下仍能保持良好性能。
在礦山、基建等復雜作業場景中,推土機的視覺盲區始終是安全事故的高發隱患。佳興偉誠推出的 360 全景盲區預警系統,通過融合多項智能技術,為重型機械裝上 “智慧雙眼”,徹底打破傳統操作的視野局限。?該系統搭載 6 路高清夜視攝像頭,可覆蓋機械周圍 5 米范圍,實時合成無畸變的 360 度全景影像。駕駛室內的 10.1 英寸觸控屏能動態顯示周圍環境,配合 AI 智能算法,當檢測到人員、車輛或障礙物進入危險區域時,會立即觸發聲光報警,并在屏幕上高亮標注風險位置,響應延遲低于 0.3 秒。?針對惡劣工況,系統采用 IP6K9K 級防護設計,-40℃至 85℃的寬溫運行能力確保在暴雨、粉塵、高溫等環境下穩定工作。內置的毫米波雷達與視覺系統形成雙重監測,即使在攝像頭被遮擋的情況下,仍能識別移動目標,實現 “視覺 + 雷達” 的冗余安全保障。佳興偉誠360全景環視駕駛輔助系統選配超聲波雷達,其預警信息與視頻畫面疊加,提升系統準確性。邢臺工程車360全景設計
360 全景盲區駕駛輔助系統,將車輛周圍景象無死角呈現,助力駕駛員掌控盲區內狀況。邢臺工程車360全景設計
佳興偉誠科技研發的工程車輛360全景環視駕駛輔助系統融入人工智能(AI)技術,實現從“看見周圍”到“理解風險”的質變飛躍。通過在前端攝像頭或中心處理單元集成高性能AI加速芯片,系統能夠實時運行復雜的深度學習模型,對全景影像中的目標進行檢測、分類與跟蹤。這雙“智能之眼”不能識別出車輛、行人、等物體,更能精確區分出靠近人員的姿態。系統結合雷達的測距測速數據與AI視覺的語義信息,構建車輛周圍動態環境的精細化數字孿生。基于此,其預警策略不再是簡單的距離閾值觸發,而是演進為具備預測能力的主動安全防護:例如,當系統識別到有行人正快速從側后方斜進入車輛轉彎內輪差區域,或有人蹲在自卸車正前方輪胎附近時,即使目標尚未進入預設的報警距離,系統也能依據其運動軌跡預測和位置關系,提前發出更高優先級的緊急警報。這種基于AI的意圖理解和風險預測能力,極大提升了預警的性和前瞻性,為操作員爭取到更充裕的避險反應時間,將事故扼殺在萌芽狀態。邢臺工程車360全景設計
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 西安北斗5G防碰撞預警定制設計 2025-12-08
- 克拉瑪依汽車防撞防碰撞預警價格 2025-12-07
- 漢中工程車防碰撞預警定制 2025-12-07
- 銅川特種車盲區防碰撞預警哪家好 2025-12-07
- 天津大型車輛盲區防碰撞預警 2025-12-07
- 株洲主動安全防碰撞預警 2025-12-07
- 雙鴨山路橋工程車防碰撞預警哪家好 2025-12-07
- 昌吉工程車防碰撞預警哪家好 2025-12-06
- 包頭商用車前向防碰撞預警方案 2025-12-06
- 廣東批發RFID嵌體生產廠家 2025-12-08
- 重慶保安公司可靠嗎 2025-12-08
- 上海辦公用大模型智能客服供應 2025-12-08
- 雙梁起重機mesh自組網多少錢 2025-12-08
- 遠距離安全光柵推薦廠家 2025-12-08
- 北京振動光纜生產商 2025-12-08
- 寧波電焊安全眼鏡定制 2025-12-08
- 上海ZK-D2180安檢門上門安裝 2025-12-08
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 浙江廚房滅火系統聯系方式 2025-12-08