寧夏工程車前向防碰撞預警電話
城市渣土車行駛路線復雜,常經過居民區、工地等區域,盲區多,事故率高。佳興偉誠的城市渣土車防碰撞預警系統,專為解決這些問題而生。系統在渣土車的車頭、車尾及兩側安裝多組傳感器,重點監測右側盲區,因為這里是容易發生事故的區域。當有行人或非機動車進入右側盲區,駕駛室內的右側警示燈立即亮起,語音播報 “右側有行人,注意避讓”;若渣土車準備右轉,系統會提前監測范圍,對可能進入轉彎軌跡的目標發出預警。系統還能記錄渣土車的行駛軌跡和預警信息,便于管理部門監管,讓渣土車在城市中安全行駛。依靠超聲波傳感器的工程車防碰撞預警系統,可準確探測車輛盲區,讓司機提前知曉潛在危險,規避碰撞。寧夏工程車前向防碰撞預警電話

港口集裝箱卡車作業環境繁忙,堆場里集裝箱林立,往來車輛眾多,碰撞事故頻發。佳興偉誠為港口集裝箱卡車打造的防碰撞預警系統,是應對這種環境的利器。系統在卡車前后及兩側安裝廣角雷達,能穿透集裝箱之間的縫隙,探測到隱藏的車輛和人員。當卡車靠近堆垛的集裝箱時,系統會提前預警 “注意右側集裝箱”;當與其他作業車輛交會距離過近,會即時播報 “左側有卡車靠近,減速避讓”。系統還能識別集裝箱的位置和高度,在吊裝集裝箱時,輔助司機判斷與吊具的距離,避免碰撞損壞貨物。該系統適應港口的高溫、高濕環境,穩定性強,為港口裝卸效率和安全提供雙重保障。寧夏工程車前向防碰撞預警電話工程車盲區 BSD防碰撞預警系統是針對工程車視野盲區引發的碰撞事故設計的安全輔助系統。
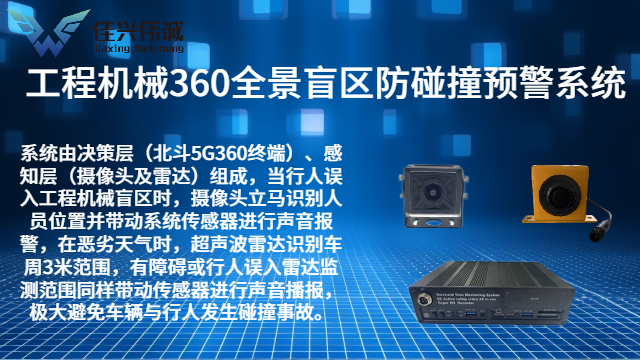
處理層的技術則賦予了系統 “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環境圖像。目標檢測與追蹤算法通過對大量數據的深度學習,能夠迅速識別出各種目標物體,并持續追蹤它們的運動軌跡。它能夠根據目標的運動狀態,提前預判潛在的危險,為預警層提供可靠的決策依據。預警層是系統與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音和光線的雙重刺激,及時提醒駕駛員注意危險。在一些特殊場景下,如工程車輛作業時,外部聲光報警裝置還能向周圍的人員發出警示,形成一個安全警示網絡。
礦山作為一個高危行業,其安全問題一直備受關注。而在礦山生產中,部分露天礦區環境惡劣,飛沙很大,礦車運輸車隊前后車距看不清,所以礦山車輛的防碰撞問題尤為突出。因此,礦山車輛前向防碰撞預警系統的應用顯得尤為重要。佳興偉誠科技針對此現象研發出礦山車輛前向防碰撞預警,此系統通過超聲波雷達對前方的障礙物進行實時監測,當發現有障礙物時,及時向駕駛員發出語音警報。提醒駕駛員降低車速從而來避免車距過近發生碰撞。相比傳統的防碰撞手段,礦山車輛前向防碰撞預警系統具有響應速度快、準確度高等優點,能夠更好地保障礦山運輸車輛安全! 佳興偉誠挖掘機作業區域AI智能防碰撞預警系統。
車輛360全景盲區防碰撞預警系統智能目標識別也是其優勢。通過 AI 算法,系統能夠準確區分 “行人”“固定障礙物”“移動車輛” 等不同目標,減少了誤報情況。例如,在復雜的施工場地中,它能夠判斷哪些是真正具有危險的移動物體,而排除樹木、土堆等非危險目標,避免駕駛員因頻繁誤報而產生困擾,從而更專注于應對實際的危險情況。實時性強是該系統的又一特點。從圖像采集到預警響應的延遲時間小于 200ms,這對于工程車輛在低速作業(0 - 30km/h)時的實時監控需求來說,至關重要。在挖掘機回轉、裝載機卸料等瞬間,系統能夠迅速捕捉到周圍環境的變化,并及時發出預警,為駕駛員爭取寶貴的反應時間,有效避免碰撞事故的發生。工程車防碰撞預警系統采用柔性傳感器技術,將傳感器巧妙地集成在車輛的保險杠、車身等部位。哈爾濱商用車前向防碰撞預警電話
工程車盲區防碰撞預警系統,讓行車安全更上一層樓。寧夏工程車前向防碰撞預警電話
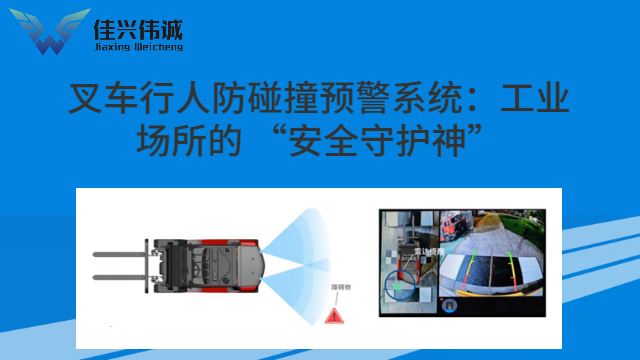
車輛 360 全景盲區防碰撞預警系統作為車輛安全領域的重要創新,以其強大的功能,為駕駛員提供了可靠的安全支持。在系統功能方面,它實現了對車輛周圍環境的 360° 無死角監測。通過多個高清攝像頭從不同角度采集圖像,再利用先進的圖像拼接技術,將這些圖像無縫融合成一個完整的全景畫面,呈現在駕駛員面前。無論是車輛前方、后方,還是兩側的盲區,都能清晰可見,讓駕駛員對車輛周圍的情況了如指掌。目標檢測與識別功能更是該系統的一大亮點。借助深度學習算法,系統能夠快速地識別出車輛、行人、障礙物等不同目標。在復雜的交通場景中,如城市街道上行人、非機動車與機動車混行的情況,系統能夠準確地區分不同目標,并實時跟蹤它們的運動軌跡。當檢測到目標靠近車輛,且存在碰撞風險時,系統會立即啟動預警機制。寧夏工程車前向防碰撞預警電話
- 青島礦區北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預警多少錢 2025-12-09
- 日喀則礦區北斗5G定位專賣 2025-12-09
- 呼倫貝爾消防車防碰撞預警方案 2025-12-09
- 臨夏工程車盲區防碰撞預警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 寧夏工程車防碰撞預警多少錢 2025-12-08
- 伊春消防車防碰撞預警設計 2025-12-08
- 黔西南北斗5G防碰撞預警廠家 2025-12-08
- 河北無感識別接送系統定制 2025-12-09
- 四川智能輔助駕駛價格多少 2025-12-09
- 廣東集中管控縱向加密有什么優勢 2025-12-09
- 香港性能強盾甲新材涂裝工藝 2025-12-09
- 靜安區本地云客服銷售電話 2025-12-09
- 包河區本地短信服務單價 2025-12-09
- 四川刷卡接送系統價格 2025-12-09
- 巢湖附近外呼機器人圖片 2025-12-09
- 山東無軌設備智能輔助駕駛商家 2025-12-09
- 浙江礦山機械智能輔助駕駛軟件 2025-12-09