大同北斗5G360全景方案
地下礦用鏟運機在狹窄巷道作業時,巷道寬度能容納車身,兩側巖壁與鏟運機的間隙形成致命盲區,易碰撞巷道支護或行走的礦工。佳興偉誠為其設計的系統,將 360 全景攝像頭與超聲波雷達集成在鏟運機車身四周。鏟運機轉彎時,雷達掃描 5 米內的巷道壁和人員,攝像頭實時拼接巷道全景,若與巖壁距離小于 0.5 米,系統發出急促警報,同時在畫面中用紅色線條標注危險邊界;當礦工在盲區行走,雷達通過人體反射波鎖定,攝像頭的紅外功能在無照明巷道內清晰顯示人員輪廓,雙重提示駕駛員減速,避免巷道內的碰撞事故。360 全景盲區駕駛輔助系統利用先進的傳感器技術,實現對盲區內物體的準確探測。大同北斗5G360全景方案

特種車輛360全景盲區監測預警系統的用戶是駕駛員/操作員,其設計必須深刻理解并優化人機交互(HMI),在提升安全性的同時避免增加認知負荷。顯示設備——全景顯示屏的選型與布置至關重要。屏幕需具備高亮度、高對比度和廣視角,確保在強光直射下圖像清晰可辨;防眩光處理能減少反射干擾;尺寸適中,位置應位于駕駛員自然視線范圍內(如儀表臺中部或A柱附近),便于快速掃視,無需大幅轉頭或低頭。顯示界面設計需簡潔直觀:全景視圖應真實無畸變,關鍵區域(如盲區報警位置)的高亮或閃爍提示需醒目但不過于刺眼;障礙物圖標標識清晰;必要時可提供分屏視圖(如前視+后視)。報警音效設計需科學:不同級別的報警應有明顯差異化的音調、節奏和音量,定向聲音報警能加速駕駛員定位風險源;語音報警(如“左側行人靠近!”)信息明確,但需避免在嘈雜環境中過度使用。報警邏輯需智能,避免在低速、安全移庫或已知有指揮員在場時產生過多干擾性誤報。好的人因工程設計,能讓系統成為操作員得力的“安全助手”,而非令人分心的“干擾源”,確保安全增益變大化。呼和浩特路橋工程車360全景設計礦山作業環境惡劣,佳興偉誠礦車 360 度全景環視駕駛輔助系統為駕駛員提供清晰視野。
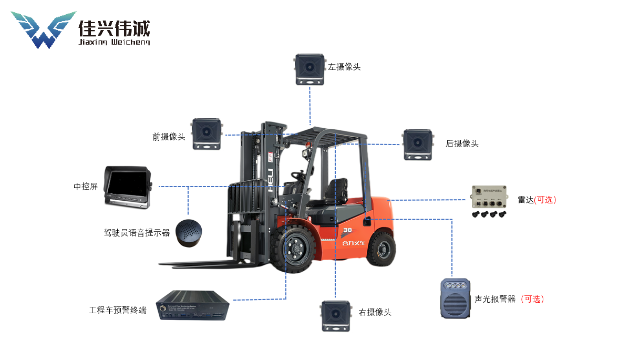
工程車360全景盲區監測預警系統的效能,源于其精密而強大的技術架構。其硬件基石是分布在車身關鍵位置(通常為車頭、車尾、左右后視鏡下方或車身兩側)的4至6顆高性能超廣角魚眼攝像頭,這些攝像頭經過特殊的光學設計和防護處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續提供穩定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實時接收所有攝像頭的視頻流,執行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復雜運算,在駕駛室內的高亮度、防眩光顯示屏上輸出無畸變、低延遲(通常≤50ms)的360度全景鳥瞰視圖。盲區監測預警功能則依賴于集成在車身周圍的毫米波雷達(中短距)和/或超聲波傳感器網絡。雷達波具有穿透雨霧、灰塵的能力,可精確探測移動或靜止障礙物的距離、方位和相對速度。系統通過多傳感器數據融合算法,將視覺信息與雷達探測信息進行時空校準和綜合分析,智能識別潛在威脅目標,濾除誤報(如飄動的篷布、地面雜物),并根據預設的風險評估模型(基于距離、接近速度、方向等)實時觸發的分級聲光報警,將無形風險轉化為操作員可直觀感知的預警信號。
佳興偉誠的車輛 360 全景盲區 AI 識別預警系統,是汽車安全領域的一項創新突破,實現了 360 全景技術與 AI 智能的深度融合。系統在傳統 360 全景系統的基礎上,創新性地植入了先進的深度學習算法,四個 1080P 高清攝像頭采集的畫面不能無縫拼接成完整的全景視圖,更能通過內置的高性能 AI 芯片實時分析畫面中的各類移動物體。無論是行人、自行車、摩托車還是其他車輛,AI 系統都能進行識別,識別率高達 98.5%。當系統檢測到盲區中有物體靠近時,會根據距離遠近進行分級預警:3 米外發出黃色提示,1.5 米內立即觸發紅色警報,同時伴隨方向盤震動與清晰的語音提示,如 “右側盲區有車輛靠近”。這種主動預警機制相比傳統全景系統更具前瞻性,能為駕駛員爭取 0.5-1 秒的寶貴反應時間,經第三方機構測試,可有效降低 80% 的盲區事故風險,為駕駛安全提供了有力保障佳興偉誠推土機 360 全景盲區預警系統:重新定義作業安全。
佳興偉誠的車輛 360 全景系統,宛如為車輛配備了無死角的的 “電子眼”。系統在車輛前后左右巧妙安置四個高清廣角攝像頭,這些攝像頭如同忠誠衛士,時刻緊密監控車輛周邊環境。當車輛啟動瞬間,攝像頭迅速開始工作,捕捉到的圖像信息被飛速傳輸至系統的處理單元。處理單元恰似一位技藝精湛的大師,運用先進算法,對這些圖像進行無縫拼接與矯正。接著,一幅清晰、完整的車輛四周 360 度全景畫面便在車內顯示屏上完美呈現,讓駕駛員仿佛擁有 “上帝視角”,對車輛周圍情況了如指掌。渣土車360全景環視駕駛輔助系統的全景環視監控功能,實時捕捉渣土車周圍環境,讓駕駛員操作更安心。阿拉善工程車360全景定制
360 全景盲區駕駛輔助系統通過精確的距離測量,在畫面上直觀顯示車輛與障礙物的距離數值。大同北斗5G360全景方案
由于運輸車安全進出工房裝卸產品的時經常發生碰撞。運輸車輛在進出工房大門時,車輛兩側存在視覺盲區,以往依靠輔助人員提示進行作業,但因環境狹窄且環境噪音大,輔助人員視線容易受阻,導致司機難以完全掌握周圍狀態,存在碰撞風險。該系統主要用于保證車上產品的運輸安全。特種車360駕駛輔助系統在車輛運輸過程中與周圍環境小于安全距離時能夠自主預警(包括車輛頂部的安全距離預警),避免司機因環境狀態未知而出現的碰撞事故。系統通過安裝在車身周圍前后左右的 4 個超廣角、高清夜視攝像頭,實時采集車身四周的高清視頻畫面,在圖像處理器中經過360算法畸變矯正、圖像拼接和融合等處理,終合成車身周圍 360°的鳥瞰全景畫面,并顯示在車載顯示屏上,為司機提供 360°全景駕駛輔助。大同北斗5G360全景方案
- 青島礦區北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預警多少錢 2025-12-09
- 日喀則礦區北斗5G定位專賣 2025-12-09
- 山南區車隊北斗5G定位哪家好 2025-12-09
- 呼倫貝爾消防車防碰撞預警方案 2025-12-09
- 臨夏工程車盲區防碰撞預警怎么樣 2025-12-09
- 濟南車隊北斗5G定位專賣 2025-12-09
- 內蒙古工程車輛行人防碰撞預警方案 2025-12-09
- 咸陽大型車輛盲區防碰撞預警設計 2025-12-08
- 寧夏工程車防碰撞預警多少錢 2025-12-08
- 煙臺合成抗溶泡沫滅火劑 2025-12-10
- 無錫附近哪里有防爆配電箱銷售電話 2025-12-10
- 松江區附近大模型智能客服銷售 2025-12-10
- 揚州道路防爆電器情況 2025-12-10
- 蘇州世澤無線圖數一體機生產廠家 2025-12-10
- 揚州防風安全眼鏡定制 2025-12-10
- 麗水輕型矯視安全眼鏡 2025-12-10
- 上海光纖測溫報警系統方案 2025-12-10
- 淮南系統外呼機器人價格查詢 2025-12-10
- 隔離欄桿推薦廠家 2025-12-10