遼寧直流無刷電機公司
直流無刷電機的低維護需求與高可靠性進一步鞏固了其市場地位。由于取消了電刷與換向器等易損機械部件,電機運行過程中無需定期更換耗材,維護成本降低約60%,同時避免了因電刷磨損引發的火花、噪音及電磁干擾問題。這一特性使其在醫療設備、精密儀器等對穩定性要求極高的領域得到普遍應用。配合先進的傳感器與控制算法,直流無刷電機可實現精確的速度調節與位置控制,響應時間縮短至毫秒級,動態性能遠超傳統電機。其結構設計的模塊化特性也支持快速定制化開發,滿足不同場景對轉速、扭矩及功率的差異化需求,成為自動化生產線、機器人關節驅動等高級裝備的重要動力源。智能魚缸過濾器通過無刷直流電機驅動,實現水循環的高效凈化。遼寧直流無刷電機公司

在精密控制與智能應用場景中,750W直流無刷電機的技術優勢得到進一步釋放。其轉子采用釹鐵硼永磁材料,結合三相繞組設計,使轉矩輸出穩定性提升18%,尤其適用于需要低速高扭運行的機器人關節、數控機床主軸等設備。在醫療領域,該電機驅動的高速離心機可實現15000r/min的精確控速,配合無級調速功能,使血液樣本分離誤差控制在±0.5%以內。智能家居系統中,搭載該電機的循環風扇通過閉環矢量控制,可根據環境溫濕度自動調節轉速,噪音值低于28dB(A),較傳統電機降低40%。此外,其鋁合金外殼與全銅線轉子的組合設計,使電機重量減輕30%,便于集成到便攜式醫療設備或空間受限的工業機器人中,展現了高功率密度與靈活部署的雙重價值。福州直流無刷電機制造氫燃料電池空壓機使用無刷直流電機,優化氫能利用效率。

從電磁相互作用層面分析,直流無刷電機的轉矩輸出源于定子旋轉磁場與轉子永磁磁場的動態耦合。當定子繞組通入三相交流電時,合成磁場以同步轉速旋轉,其空間矢量軌跡呈圓形或近似圓形。轉子永磁體在磁場牽引下被迫跟隨旋轉,但因慣性作用始終滯后磁場一個電角度,此角度差直接決定電磁轉矩大小。根據公式T=Kt·I(T為轉矩,Kt為轉矩常數,I為電流),控制器通過調節電流幅值可實現轉矩線性控制。例如,在低速大負載場景中,系統會提高電流供給以維持轉矩;高速輕載時則降低電流以減少銅損。此外,無刷電機的轉速控制依賴于磁場旋轉頻率與轉子極數的匹配關系,公式n=60f/p(n為轉速,f為電源頻率,p為極對數)表明,固定極數下調整頻率即可實現無級調速。實際應用中,通過PID算法對轉速誤差進行閉環修正,可使電機在負載突變時保持±1%的轉速精度。相較于有刷電機因電刷磨損導致的轉速波動,無刷電機的電子換向系統將壽命延長至數萬小時,同時效率提升15%-20%,成為工業自動化、電動汽車等領域的主流驅動方案。
一體式直流無刷電機作為現代機電系統的重要動力元件,其設計理念將驅動、控制與傳動功能高度集成,突破了傳統電機與驅動器分離的結構局限。這種結構通過將電機本體、位置傳感器、功率電子模塊及控制算法封裝在統一殼體內,明顯減少了系統體積與連接線路,提升了電磁兼容性與運行穩定性。其重要技術優勢體現在三方面:一是采用永磁轉子與電子換向技術,消除了機械電刷的摩擦損耗與電火花干擾,使電機壽命延長至傳統有刷電機的3-5倍;二是通過內置的智能驅動芯片實現閉環控制,可根據負載變化動態調整轉矩與轉速,能量轉換效率較異步電機提升15%-20%;三是模塊化設計支持即插即用,適配工業機器人、數控機床、新能源車輛等需要高精度動態響應的場景,其調速范圍可達1:10000,位置控制精度達到±0.01°。在智能制造浪潮下,該技術已成為自動化設備小型化、節能化的關鍵推動力。通訊基站散熱風扇用無刷直流電機,持續降溫,保障設備穩定。
大功率直流無刷電機作為現代工業與高級裝備領域的重要動力部件,憑借其高效能、高可靠性和長壽命等特性,正逐步取代傳統有刷電機和異步電機,成為新能源、軌道交通、工業自動化等領域選擇的驅動方案。其重要優勢在于采用電子換向技術替代機械電刷,消除了電火花和機械磨損,明顯提升了運行穩定性,同時通過優化電磁設計與散熱結構,使功率密度大幅提升,可滿足高負載、高轉速的嚴苛工況需求。例如,在新能源汽車驅動系統中,大功率直流無刷電機通過集成永磁體與智能控制算法,實現了高轉矩輸出與寬速域調速的平衡,配合先進的矢量控制技術,可精確匹配不同駕駛場景的動力需求,有效提升能源利用率與續航里程。此外,其模塊化設計支持快速維護與升級,進一步降低了全生命周期成本,為設備制造商提供了更具競爭力的解決方案。實驗室冷凍干燥機搭載無刷直流電機,保障樣品干燥的均勻性。惠州三相直流無刷電機
智能空氣循環扇通過無刷直流電機驅動,提供自然風感的靜音體驗。遼寧直流無刷電機公司
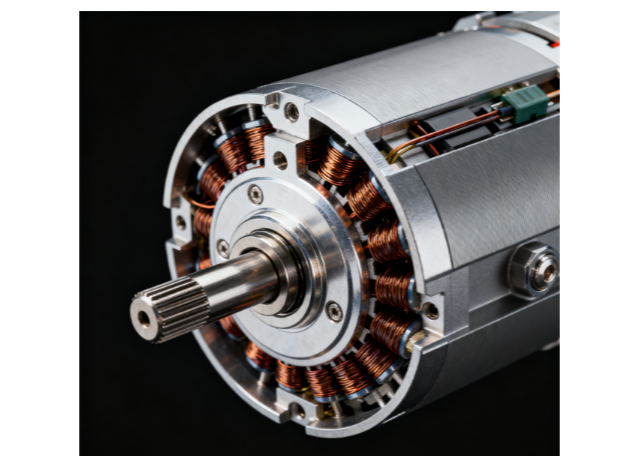
位置檢測與控制策略是三相直流無刷電機實現穩定運行的關鍵。有感控制方案采用霍爾傳感器陣列,通常以120°或60°電角度間隔布置于定子槽間,通過檢測轉子磁極經過時產生的霍爾電壓變化,輸出三路正交信號。例如,當轉子N極接近A相與B相繞組之間時,霍爾傳感器H1輸出高電平,控制器據此導通A相下橋臂與B相上橋臂的MOSFET,使電流從A相流入、B相流出,形成定向磁場。無感控制方案則通過反電動勢過零檢測實現換向,當轉子旋轉時,懸空相繞組會感應出與轉速成正比的反電動勢,其過零點對應轉子磁極與定子繞組的相對位置。控制器通過比較三相反電動勢的過零時刻,推算出轉子電角度,進而生成六步換向時序。例如,在高速運行場景中,無感控制可省略傳感器安裝環節,降低成本并提升可靠性,但需解決低速時反電動勢幅值過小導致的檢測失效問題。兩種方案的選擇取決于應用場景對成本、精度與動態響應的權衡,共同支撐了三相直流無刷電機在工業自動化、消費電子等領域的普遍應用。遼寧直流無刷電機公司
- 福建平板直線電機國內廠家 2025-12-09
- 高速無刷電機EC2644-24140H 2025-12-09
- 深圳數控平板直線電機價格 2025-12-09
- 沈陽平板型平板直線電機 2025-12-09
- 佛山有鐵芯直線電機制造商 2025-12-09
- 佛山高性能平板直線電機現貨 2025-12-09
- 山西平板直線電機生產公司 2025-12-09
- 東莞工字型平板直線電機研發 2025-12-09
- 總線無刷電機EC3056-2480H 2025-12-09
- 河南平板直線電機有哪些品牌 2025-12-09
- 廣東光伏濕法設備廠家 2025-12-10
- 江西農用摩托車鏈條 2025-12-10
- 北京螺絲機轉讓 2025-12-10
- 蘇州銘牌打刻機供應商 2025-12-10
- 歐姆電子工業無線遙控器安裝 2025-12-10
- 云南316噸桶哪里好 2025-12-10
- 瀘州電子束卷繞鍍膜機售價 2025-12-10
- 河北耐熱鋼鑄件廠家 2025-12-10
- 揚州耐用尼龍材料吸濕設備哪家好 2025-12-10
- 1200kw有機熱載體鍋爐哪里有賣 2025-12-10