杭州ppu機械手公司
搬運機械手是物流倉儲領域實現智能搬運的關鍵設備,通過AGV小車與機械臂的組合,完成貨物從存儲區到分揀區的全自動流轉。其導航系統采用激光SLAM技術,能在復雜倉庫環境中自主規劃路徑,定位精度達±10毫米。在電商倉庫,搬運機械手可抓取重量達500公斤的貨架進行跨區域轉運,通過與輸送線聯動實現訂單的快速履約。設備配備的柔性夾具能適應紙箱、塑料筐等多種包裝形式,通過壓力傳感器控制抓取力度。此外,搬運機械手支持5G網絡通信,可與倉儲管理系統實時交互數據,動態調整作業任務。其模塊化設計允許根據業務需求擴展功能,如增加視覺識別模塊或機械臂自由度。設備表面進行防銹處理,適應高濕度環境,維護成本低。工業機器人機械手在半導體封裝中,實現芯片的精確貼裝。杭州ppu機械手公司

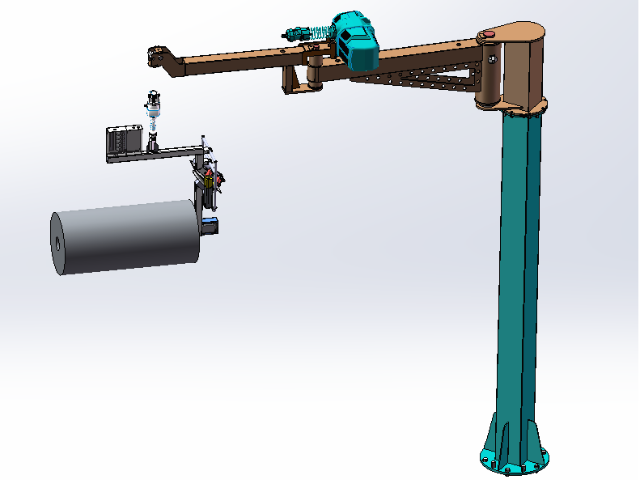
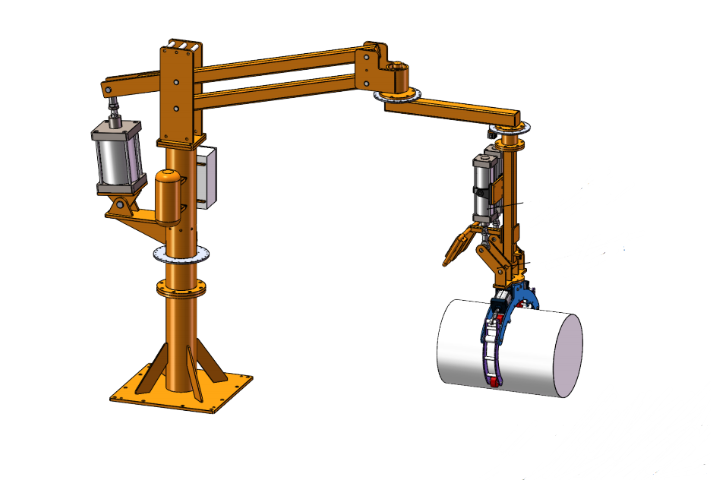
氣動助力機械手是一種通過氣壓平衡實現重物搬運的設備,采用平衡閥與機械鎖止裝置組合,確保操作過程中的安全性。設備負載能力可達300公斤,適應發動機、變速箱等重型零部件的轉移。在機械制造車間,氣動助力機械手可抓取鑄件進行裝配作業,通過浮動裝置自動調整抓取角度,避免工件劃傷。其配備的防墜落裝置在氣壓異常時自動啟動,確保負載不脫落。設備表面進行防銹處理,適應油污較多的加工環境,清潔時只需用擦拭布清理即可。此外,氣動助力機械手支持手動與自動模式切換,操作人員可根據需求選擇控制方式,提升作業靈活性。常州六軸機械手結構助力機械手廠家提供定制化服務,適配特殊工況需求。
工業機械手是金屬加工車間的重要設備,通過六軸關節結構實現復雜曲面的打磨、切割等作業。設備采用高剛性材質臂體,單臂負載可達500公斤,適應鑄件、鋼板等重型物料。在船舶制造領域,工業機械手可抓取大型分段進行焊接作業,通過激光跟蹤系統確保焊縫質量。其配備的冷卻裝置能有效降低電機溫度,適應長時間連續作業。設備表面進行防震處理,減少加工震動對精度的影響。此外,工業機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其模塊化設計允許根據加工需求更換末端工具,如焊槍、打磨頭等,提升設備利用率。
四軸機械手是包裝行業實現標準化生產的關鍵設備,通過四軸聯動實現物料的快速抓取與放置。其結構緊湊,占地面積小,適應狹窄的包裝生產線。在藥品包裝車間,四軸機械手可抓取藥瓶、說明書等物料進行自動裝盒,單次循環時間低于1秒。設備采用模塊化設計,吸盤與夾爪可快速更換,適應不同規格包裝。其配備的防呆裝置在物料缺失時自動報警,避免漏裝風險。此外,四軸機械手內置能耗監測模塊,實時優化電機功率輸出,降低單臺設備能耗15%。設備操作界面支持觸摸屏控制,操作人員可通過圖標化菜單預設工作模式,如單件抓取、多件組合等。其維護時只需定期潤滑關節部件,即可保持性能穩定,設備壽命長達8年以上。四軸機械手在玩具組裝中,完成多部件的自動鎖付作業。
工業機器人機械手是現代金屬加工車間的重要設備,通過多軸聯動與高精度傳感器組合,實現復雜曲面的打磨、切割及裝配作業。設備采用高剛性材質臂體,單臂負載可達數百公斤,適應鑄件、鋼板等重型物料。在航空航天領域,工業機器人機械手可抓取鈦合金部件進行精密銑削,通過激光跟蹤系統確保加工精度。其配備的冷卻裝置能有效降低電機溫度,適應長時間連續作業。設備表面進行防震處理,減少加工震動對精度的影響。此外,工業機器人機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其模塊化設計允許根據加工需求更換末端工具,如焊槍、打磨頭等,提升設備利用率。吸盤式機械手在光伏組件中,防止電池片在搬運中破裂。成都全自動沖床機械手控制系統
小型機械手采用輕量化設計,適用于電子元件的精密裝配。杭州ppu機械手公司
吸盤機械手是包裝生產線的重要設備,通過真空吸盤與氣動驅動組合,實現紙箱、塑料盒等輕質物料的無損搬運。設備采用模塊化設計,吸盤數量與布局可根據物料尺寸調整,適應多樣化包裝形式。在食品飲料工廠,吸盤機械手可抓取瓶裝、罐裝產品進行裝箱作業,通過壓力傳感器實時監測吸附狀態,避免包裝變形。其配備的防塵罩能有效隔離粉塵,延長設備使用壽命。此外,吸盤機械手支持與輸送線聯動,通過總線通信實現貨物到位檢測與抓取動作的同步,減少等待時間。設備表面進行耐磨處理,適應長期高速運轉,故障率低于0.5%。杭州ppu機械手公司
- 成都斗式提升機廠家 2025-12-08
- 深圳氣管吸吊機原理 2025-12-08
- 廣東無動力吸吊機品牌 2025-12-08
- 湖北單臂吸吊機價格 2025-12-08
- 成都多功能提升機多少錢一臺 2025-12-07
- 山東多功能提升機哪家好 2025-12-07
- 真空氣管吸吊機品牌 2025-12-07
- 南京吸盤式機械手品牌 2025-12-07
- 山東三軸機械手公司 2025-12-07
- 河南z型斗式提升機哪家好 2025-12-07
- 秦淮區消音器牌子 2025-12-08
- 泰州鈦反應釜現貨 2025-12-08
- 山東國產自動組裝機 2025-12-08
- 成都斗式提升機廠家 2025-12-08
- 貴州本地琛鑫輕創營實訓市場 2025-12-08
- 長寧區銷售鉸鏈操作 2025-12-08
- 貴陽高速沖壓設備聯系方式 2025-12-08
- 智能地下管線探測儀視頻 2025-12-08
- 珠海定做小型打磨去毛刺設備生產廠家 2025-12-08
- 鋁合金熔爐集塵罩殼技術參數 2025-12-08