寧波激光切割機機械手控制系統
六軸機械手是一種高自由度設備,通過仿生關節設計與力反饋控制,實現復雜醫療產品的精密加工。其末端執行器可更換為激光焊接頭、超聲波清洗器等工具,適應導管、植入物等多樣化任務。在心臟支架制造車間,六軸機械手能完成鎳鈦合金管材的激光切割,通過視覺定位系統確保微孔精度。設備配備潔凈室專屬密封組件,避免顆粒物污染,符合GMP標準。其表面進行防腐蝕處理,適應化學清洗環境,維護時只需定期潤滑關節部件即可。此外,六軸機械手支持多任務并行處理,如同時進行切割、清洗與檢測,提升生產效率。設備操作界面支持多語言切換,適應跨國企業的研發需求。桁架機械手在汽車焊裝線中,實現車身骨架的自動搬運。寧波激光切割機機械手控制系統

搬運機械手是食品包裝領域的關鍵設備,通過不銹鋼材質主體與食品級潤滑劑確保衛生安全。其末端執行器采用柔性吸盤,避免對包裝袋、紙盒等物料造成壓痕,同時配備動態吸附力調節功能,根據物料重量自動調整抓取力度。在乳制品工廠,搬運機械手可抓取25公斤裝奶粉桶進行碼垛作業,單次起吊高度達3米。設備配備自動清洗系統,每次作業后可用高溫蒸汽消毒,防止細菌滋生。其表面進行防銹處理,適應高濕度環境,清潔時只需用中性洗滌劑擦拭即可。此外,搬運機械手內置負載監測模塊,實時顯示抓取重量,避免超載風險。設備操作界面支持HACCP認證,可記錄每次作業的時間、重量等數據,實現質量追溯。寧波激光切割機機械手控制系統助力機械臂采用人體工學設計,減輕操作人員勞動強度。
碼垛機械手是化工行業處理袋裝物料的專屬設備,通過較強度合金框架與防滑夾爪組合,實現50公斤至1噸物料的穩定搬運。其配備防爆電機與靜電接地裝置,滿足易燃易爆物料的搬運規范。在化肥生產車間,碼垛機械手可抓取編織袋、塑料袋等包裝形式,按照預設圖案進行碼垛作業,單次堆垛高度達2.5米。設備配備壓力傳感器,實時監測夾爪與物料的接觸力,避免包裝破損。其表面進行防腐蝕處理,適應酸堿性環境,清潔時只需用水沖洗即可。此外,碼垛機械手內置安全光幕,當檢測到人員進入作業區域時自動暫停,防止碰撞風險。設備操作界面支持多語言切換,適應跨國企業的管理需求。
工業機器人機械手是現代自動化生產線的中心組件,通過多關節臂體與末端執行器的協同,實現物料搬運、裝配、檢測等復雜任務。設備采用伺服電機驅動,重復定位精度可達±0.05毫米,適應電子元件、汽車零部件等高精度加工場景。在3C產品組裝車間,工業機器人機械手可抓取芯片、電阻等微型元件,通過視覺定位系統自動調整放置角度,確保組裝質量。其配備的碰撞檢測功能能有效避免與周邊設備發生干涉,保障生產安全。設備表面進行防靜電處理,適應無塵車間環境,清潔時只需用吸塵器清理即可。此外,工業機器人機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其模塊化設計允許根據生產需求更換末端工具,如焊槍、噴涂頭等,提升設備利用率。PPU機械手采用平行結構,提升物料搬運的效率。
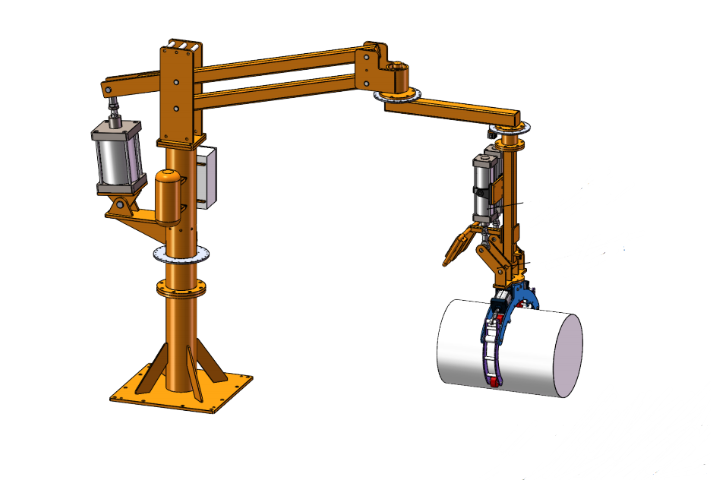
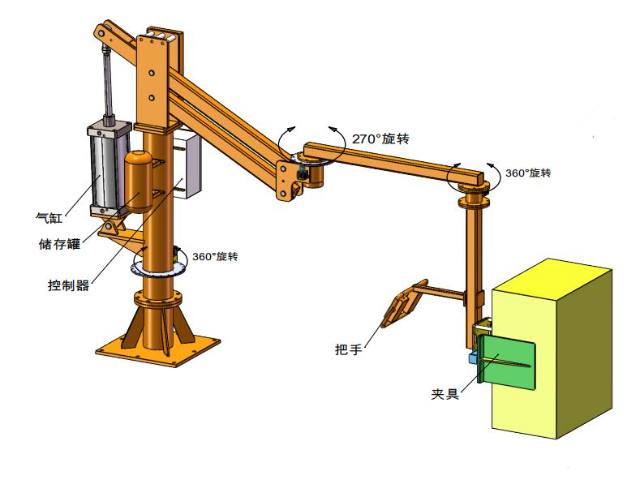
助力機械臂是一種通過氣動或電動驅動實現物料搬運與裝配定位的設備,其設計重點在于人機協同作業的便捷性。在汽車總裝車間,助力機械臂常用于發動機艙部件、座椅等重型物料的安裝。設備通過負載平衡系統自動補償物料重量,操作人員只需施加輕微力量即可完成精確定位。其可調節臂展覆蓋2米至6米的工作范圍,適應不同車型的生產線布局。助力機械臂表面進行防銹處理,適應涂裝車間的化學環境,維護時只需定期潤滑關節部件。此外,設備配備安全鎖止功能,當檢測到異常外力時自動暫停作業,保障人員安全。其模塊化接口支持快速更換夾具,滿足多車型共線生產需求。小型機械手在實驗室中,完成試管、樣本的精密轉移。江蘇吸盤式機械手原理
注塑機機械手通過總線通信,與注塑機實現生產節拍同步。寧波激光切割機機械手控制系統
激光切割機機械手是鈑金加工領域的專屬設備,通過六軸關節結構與激光切割頭組合,實現復雜形狀板材的自動化切割。設備采用高功率光纖激光器,切割速度可達每分鐘數十米,適應碳鋼、不銹鋼等不同材質。在廚房設備制造車間,激光切割機機械手可抓取鍍鋅板進行異形孔切割作業,通過視覺定位系統確保孔位精度。其配備的除塵裝置能有效收集切割煙塵,改善車間環境。設備表面進行防腐處理,適應金屬碎屑較多的環境,清潔時只需用吸塵器清理即可。此外,激光切割機機械手支持多工藝切換,通過更換切割頭或調整激光參數,適應不同厚度的板材。其模塊化設計允許根據加工需求擴展功能,如增加自動上下料系統。寧波激光切割機機械手控制系統
- 成都斗式提升機廠家 2025-12-08
- 深圳氣管吸吊機原理 2025-12-08
- 廣東無動力吸吊機品牌 2025-12-08
- 成都多功能提升機多少錢一臺 2025-12-07
- 山東多功能提升機哪家好 2025-12-07
- 真空氣管吸吊機品牌 2025-12-07
- 南京吸盤式機械手品牌 2025-12-07
- 山東三軸機械手公司 2025-12-07
- 河南z型斗式提升機哪家好 2025-12-07
- 河南機械手定制 2025-12-07
- 無錫排渣電站閥規格 2025-12-08
- 鄭州小型等離子耐磨粉末堆焊機廠家 2025-12-08
- 北京家用保險柜防火柜哪家好 2025-12-08
- 上海防火實驗室活動柜安裝 2025-12-08
- 濟南小型原理圖設計工具批發價格 2025-12-08
- 液體包裝機 2025-12-08
- 吉林銷售兄弟機床配件主軸馬達風扇 2025-12-08
- 濱湖區國產格式真空管道銷售價格 2025-12-08
- 江蘇薄膜復卷機生產廠家 2025-12-08
- 上海國內方向盤裝配產線技術指導 2025-12-08