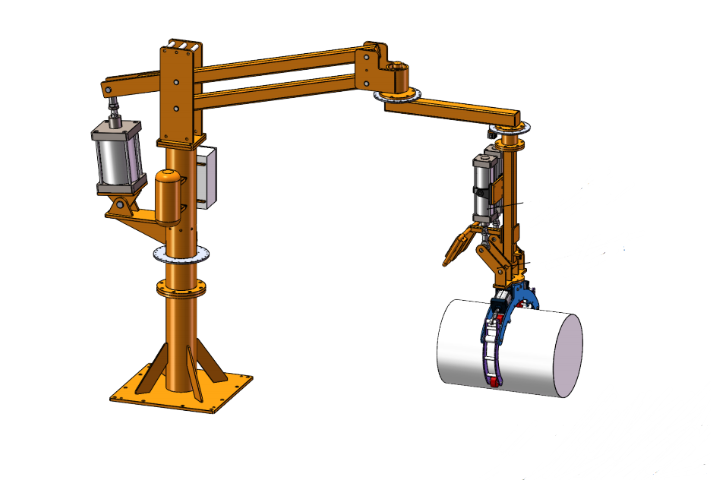
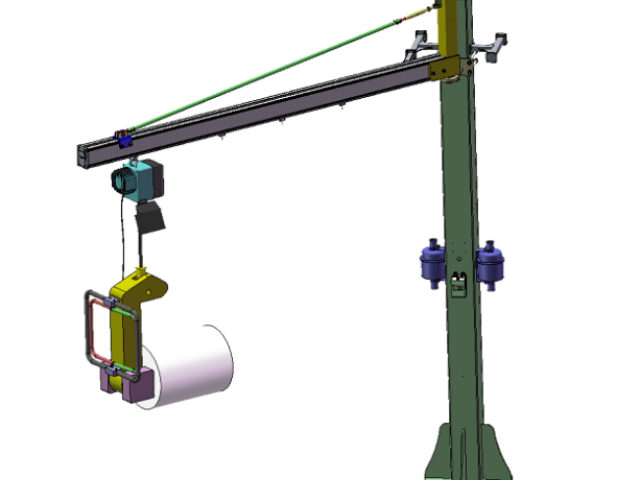
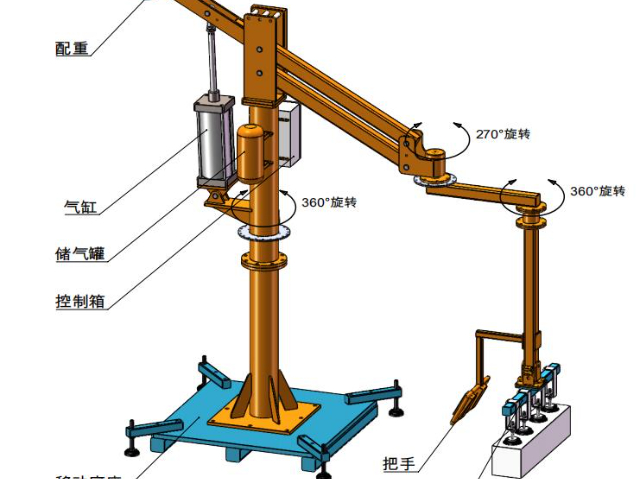
湖南助力機械手控制系統
隧道濕噴機械手是地下工程施工的專屬設備,通過多關節臂體與噴漿泵組合,實現混凝土濕噴作業的自動化控制。設備采用遙控操作模式,操作人員可在安全距離外控制噴漿方向與厚度,適應隧道、涵洞等狹窄空間。在鐵路隧道建設中,隧道濕噴機械手可抓取混凝土進行初支噴射,通過激光掃描儀實時監測噴射質量,自動調整噴漿量。其配備的除塵裝置能有效降低作業粉塵,改善施工環境。設備表面進行防腐處理,適應潮濕環境,維護時只需定期更換噴嘴即可。此外,隧道濕噴機械手內置故障診斷系統,通過傳感器實時監測液壓油溫、壓力等參數,提前預警潛在問題。其模塊化設計允許根據工程需求擴展功能,如增加錨桿鉆孔裝置。注塑機機械手通過總線通信,與注塑機實現生產節拍同步。湖南助力機械手控制系統
六軸機械手是一種高自由度設備,通過仿生關節設計與力反饋控制,實現復雜醫療產品的精密加工。其末端執行器可更換為激光焊接頭、超聲波清洗器等工具,適應導管、植入物等多樣化任務。在心臟支架制造車間,六軸機械手能完成鎳鈦合金管材的激光切割,通過視覺定位系統確保微孔精度。設備配備潔凈室專屬密封組件,避免顆粒物污染,符合GMP標準。其表面進行防腐蝕處理,適應化學清洗環境,維護時只需定期潤滑關節部件即可。此外,六軸機械手支持多任務并行處理,如同時進行切割、清洗與檢測,提升生產效率。設備操作界面支持多語言切換,適應跨國企業的研發需求。長沙吸盤式機械手設計PPU機械手在飼料加工中,實現袋裝物料的快速碼垛。
工業機器人機械手是現代自動化生產線的中心組件,通過多關節臂體與末端執行器的協同,實現物料搬運、裝配、檢測等復雜任務。設備采用伺服電機驅動,重復定位精度可達±0.05毫米,適應電子元件、汽車零部件等高精度加工場景。在3C產品組裝車間,工業機器人機械手可抓取芯片、電阻等微型元件,通過視覺定位系統自動調整放置角度,確保組裝質量。其配備的碰撞檢測功能能有效避免與周邊設備發生干涉,保障生產安全。設備表面進行防靜電處理,適應無塵車間環境,清潔時只需用吸塵器清理即可。此外,工業機器人機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其模塊化設計允許根據生產需求更換末端工具,如焊槍、噴涂頭等,提升設備利用率。
伺服機械手是一種采用伺服電機驅動的自動化設備,通過閉環控制實現高精度動作。在光學元件加工車間,伺服機械手可抓取直徑5毫米的鏡片,進行鍍膜與檢測作業。設備采用低摩擦導軌與高剛性臂架,確保運動過程中的微小振動抑制。其配備的力傳感器實時監測抓取力度,避免脆性物料破損。伺服機械手表面進行防靜電處理,避免元件吸附灰塵,維護時只需定期校準傳感器即可保持性能。此外,設備支持與加工機床聯動,通過I/O信號自動交換動作指令,實現無人化生產。其動態響應時間低于10毫秒,卓著提升生產節拍。六軸機械手在航空制造中,完成復合材料部件的鉆孔作業。
工業機械手是金屬加工車間的重要設備,通過六軸關節結構實現復雜曲面的打磨、切割等作業。設備采用高剛性材質臂體,單臂負載可達500公斤,適應鑄件、鋼板等重型物料。在船舶制造領域,工業機械手可抓取大型分段進行焊接作業,通過激光跟蹤系統確保焊縫質量。其配備的冷卻裝置能有效降低電機溫度,適應長時間連續作業。設備表面進行防震處理,減少加工震動對精度的影響。此外,工業機械手支持離線編程,操作人員可通過仿真軟件預設工藝路徑,縮短現場調試時間。其模塊化設計允許根據加工需求更換末端工具,如焊槍、打磨頭等,提升設備利用率。全自動碼垛機械手通過負載傳感器,實時監測物料重量。工業機器人機械手原理
助力吸盤機械手在建材行業,抓取石材、瓷磚等物料。湖南助力機械手控制系統
吸盤式機械手是建筑幕墻安裝的專屬設備,通過真空吸附技術實現玻璃、石材等板材的無損抓取。其主體采用碳纖維材質,減輕重量同時保證剛性,末端執行器配備多組獨自控制的吸盤單元,適應不同尺寸的幕墻單元。在超高層建筑外立面施工中,吸盤式機械手可抓取面積達6平方米的玻璃板,通過激光測距儀實時校準位置,偏差控制在±1毫米以內。設備配備風速傳感器,當風力超過6級時自動啟動保護模式,避免板材擺動。其表面進行防腐處理,適應戶外惡劣天氣條件,雨雪天氣仍可正常作業。此外,吸盤式機械手支持與塔吊協同作業,通過無線通信實現同步控制,提升安裝效率。設備能耗比傳統機械夾具降低30%,符合綠色施工要求。湖南助力機械手控制系統
- 成都多功能提升機多少錢一臺 2025-12-07
- 山東多功能提升機哪家好 2025-12-07
- 真空氣管吸吊機品牌 2025-12-07
- 山東三軸機械手公司 2025-12-07
- 河南z型斗式提升機哪家好 2025-12-07
- 河南機械手定制 2025-12-07
- 常州升降機 2025-12-07
- 寧波全自動碼垛機械手公司 2025-12-07
- 四川小型液壓提升機安裝規范 2025-12-07
- 武漢小型液壓提升機性能 2025-12-06
- 山西購買琛鑫輕創營實訓用戶體驗 2025-12-07
- 閔行區實驗室家具誠信合作 2025-12-07
- 常州通用儀器儀表交易價格 2025-12-07
- 3型液壓力矩扳手螺栓安裝視頻 2025-12-07
- 浙江無框智能開關對比價 2025-12-07
- 沈陽耐腐蝕導熱油鍋爐廠家直銷 2025-12-07
- 杭州智能導熱油鍋爐價格 2025-12-07
- 貴州換熱器供應商家 2025-12-07
- 浙江撬裝干燥機應用案例 2025-12-07
- 浙江閥門廠家 2025-12-07